Happy Halloween, everyone! We all celebrate Halloween at Open Robotics, no matter where we’re working from!





Happy Halloween, everyone! We all celebrate Halloween at Open Robotics, no matter where we’re working from!
During his internship with Open Robotics, Adam Allevato ported a 3D object detector into ROS 2 and made it run on live depth camera data. The detector leverages ROS 2 features such as intraprocess communication and shared memory to run with lower overhead than the ROS 1 version. Using the ros1_bridge, we can also interface the detector with ROS 1 tools (like Rviz) if desired.
By porting a few other packages for vision and robot motion, we are now able to perform vision-based manipulation using an industrial robot arm 100% ROS 2 code. We like to call this the “picky robot” because it can preferentially push food it doesn’t like off the table and into the trash.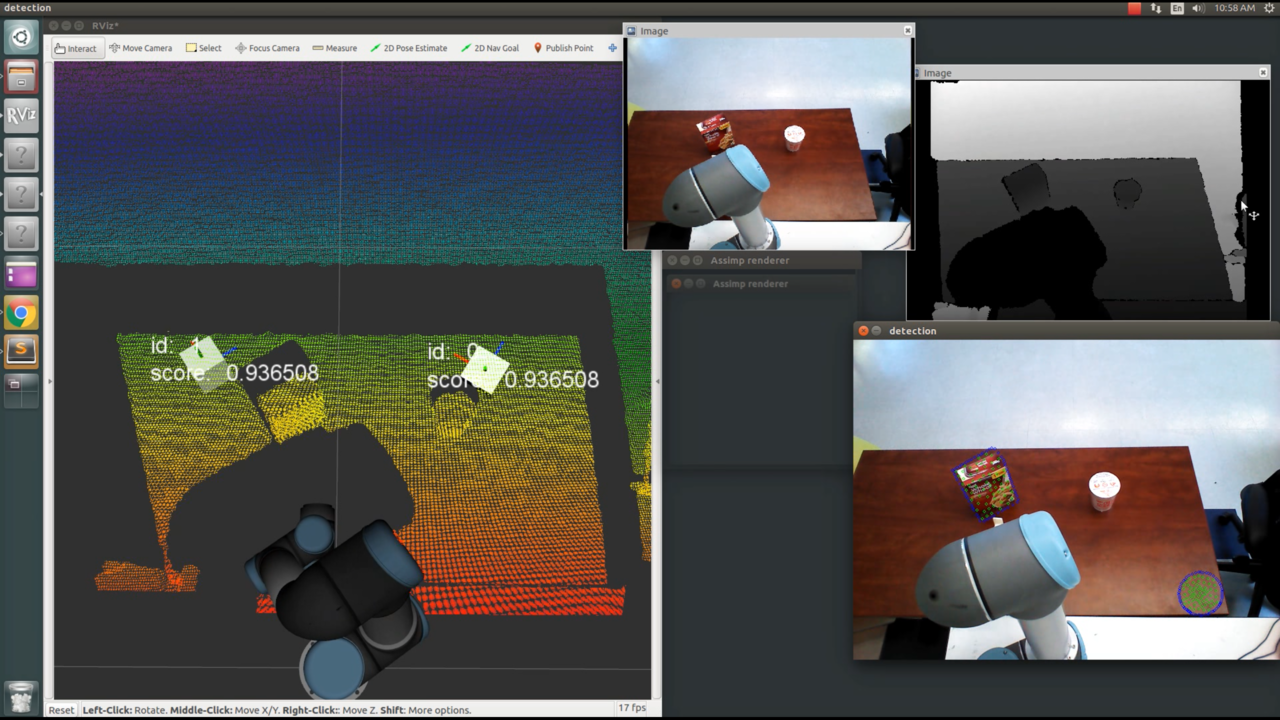
For even more details, attend our upcoming ROSCon 2017 talk, “Using ROS2 for Vision-Based Manipulation with Industrial Robots,”.
The demo is open source and available on Github (still in development). We’re excited to integrate even more use cases and platforms with ROS 2 moving forward!
We are happy to announce the final results of the Agile Robotics for Industrial Automation Competition (ARIAC).
ARIAC is a simulation-based competition designed to promote agility in industrial robot systems by utilizing the latest advances in artificial intelligence and robot planning. The goal is to enable industrial robots on the shop floors to be more productive, more autonomous, and more responsive to the needs of shop floor workers. The virtual nature of the competition enabled participation of teams affiliated with companies and research institutions from across three continents.
While autonomously completing pick-and-place kit assembly tasks, teams were presented with various agility challenges developed based on input from industry representatives. These challenges include failing suction grippers, notification of faulty parts, and reception of high-priority orders that would prompt teams to decide whether or not to reuse existing in-progress kits.
Teams had control over their system’s suite of sensors positioned throughout the workcell, made up of laser scanners, intelligent vision sensors, quality control sensors and interruptible photoelectric break-beams. Each team participating in the finals chose a unique sensor configuration with varying associated costs and impact on the team’s strategy.
The diversity in the teams’ strategies and the impact of their sensor configurations can be seen in the video of highlights from the finals:
Scoring was performed based on a combination of performance, efficiency and cost metrics over 15 trials. The overall standings of the top teams are as follows.
First place: Realization of Robotics Systems, Center for Advanced Manufacturing, University of Southern California
Second place: FIGMENT, Pernambuco Federal Institute of Education, Science, and Technology / Federal University of Pernambuco
Third place: TeamCase, Case Western Reserve University
Top-performing teams will be presenting at IROS 2017 in Vancouver, Canada in a workshop held on Sunday, September 24th. Details for interested parties are available at https://www.nist.gov/el/intelligent-systems-division-73500/agile-robotics-industrial-automation-competition-ariac
The IROS workshop is open to all, even those that did not compete. In addition to having presentations about approaches used in the competition, we will also be exploring plans for future competitions. If you would like to give a presentation about agility challenges you would like to see in future competitions, please contact Craig Schlenoff (craig.schlenoff@nist.gov).
Congratulations to all teams that participated in the competition. We look forward to seeing you in Vancouver!
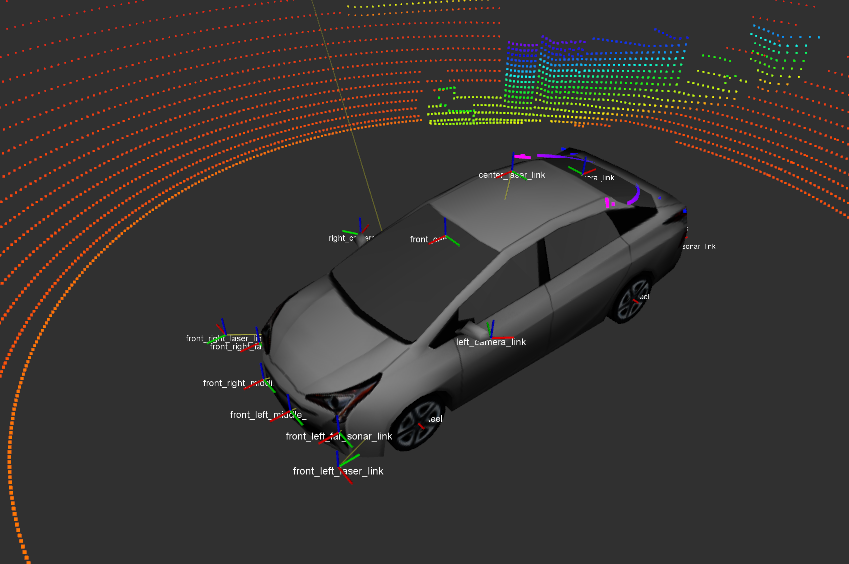
We are excited to show off a simulation of a Prius in Mcity using ROS Kinetic and Gazebo 8. ROS enabled the simulation to be developed faster by using existing software and libraries. The vehicle’s throttle, brake, steering, and transmission are controlled by publishing to a ROS topic. All sensor data is published using ROS, and can be visualized with RViz.
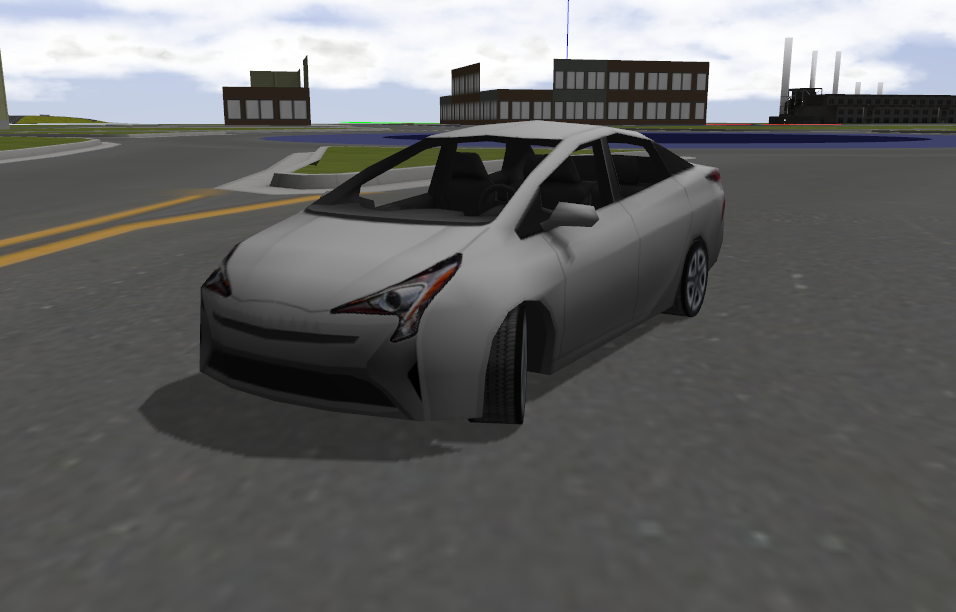
We leveraged Gazebo’s capabilities to incorporate existing models and sensors.
The world contains a new model of Mcity and a freeway interchange. There are also models from the gazebo models repository including dumpsters, traffic cones, and a gas station. On the vehicle itself there is a 16 beam lidar on the roof, 8 ultrasonic sensors, 4 cameras, and 2 planar lidar.
The simulation is open source and available at on GitHub at osrf/car_demo. Try it out by installing nvidia-docker and pulling “osrf/car_demo” from Docker Hub. More information about building and running is available in the README in the source repository.
Most of the interns and mentors spent a sunny day in San Francisco together. Our first stop was at Golden Gate park, where we fired up the grill to cook some tasty tri-tip and veggies before exercising our memory playing “Merci”.


We then switched gears at SPiN, a nice bar-restaurant where you can eat, drink, listen music and play ping pong.

Some of us discovered that 8 people can play ping pong on the same table at the same time!

Fun!

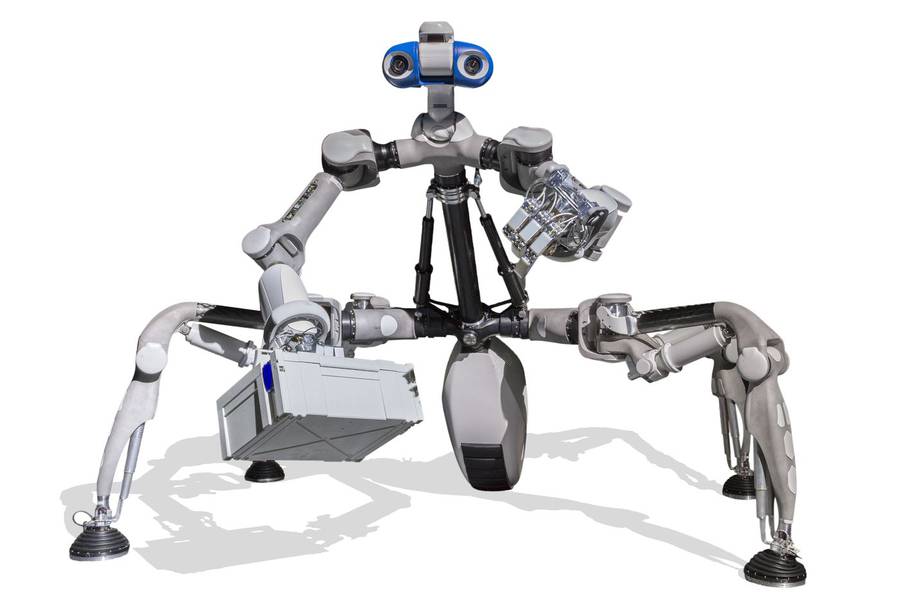
We’ve been working for the past several months with the NASA Ames Intelligent Robotics Group. We’re helping them to model and simulate their forthcoming Resource Prospector (RP) rover, which will be sent to a pole of the moon to drill for water (as ice) and other volatiles. In advance of the mission, they’re using Gazebo to simulate RP to, among other things, support driving experiments with human operators. For these experiments, the visual realism of the camera images that we produce in Gazebo is paramount. So we’re very excited to share this recent result, which shows the view from a simulated camera mounted on the RP model being teleoperated over lunar terrain:
To create the scene shown in the video we made several improvements to the Gazebo rendering component. First, we extended Gazebo’s ability to load and render large a high resolution (8K) DEM model by 1) adding Level-Of-Detail (LOD) support, which made it possible to render large terrains at improved rendering performance; and 2) caching and saving of heightmap data to disk, which significantly reduced the load time of the model. We then added support for using custom shaders with Gazebo heightmaps. The heightmap model in the video uses a high resolution texture map, normal map, bump map, and illumination map, and applies Hapke shading and real time shadows in custom shaders. We also increased the shadow texture size and tweaked a few shadow parameters in an effort to generate sharper shadows. Finally, we post-process the scene by adding some nice looking lens flare effect to the camera.
We’re looking forward to further improving rendering in Gazebo and providing examples of what you can do to get more realistic camera images in your own simulations.
At our company fun day last month, we used our newly acquired glass mosaic and welding skills to collaboratively create a sign that shows off our new name and logo. And now it’s hanging up in the office:

Congratulations to everybody who contributed to the construction of the sign!
Michael Ferguson spent a year as a software engineer at Willow Garage, helping rewrite the ROS calibration system, among other projects. In 2013, he co-founded Unbounded Robotics, and is currently the CTO of Fetch Robotics. At Fetch, Michael is one of the primary people responsible for making sure that Fetch’s robots reliably fetch things. Mike’s ROSCon talk is about how to effectively use ROS as an integral part of your robotics business, including best practices, potential issues to avoid, and how you should handle open source and intellectual property.
Because of how ROS works, much of your software development (commercial or otherwise) is dependent on many external packages. These packages are constantly being changed for the better — and sometimes for the worse — at unpredictable intervals that are completely out of your control. Using continuous integration, consisting of systems that can handle automated builds, testing, and deployment, can help you catch new problems as early as possible. Michael also shares that a useful way to avoid new problems is to not immediately switch over to new software as soon as they are available: instead, stick with long-term support releases, such as Ubuntu 14.04 and ROS Indigo.
While the foundation of ROS is built on open source, using ROS doesn’t mean that all of the software magic that you create for your robotics company has to be given away for free. ROS supports many different kinds of licenses, some of which your lawyers will be more happy with than others, but there are enough options with enough flexibility that it doesn’t have to be an issue. Using Fetch Robotics as an example, Mike discusses what components of ROS his company uses in their commercial products, including ROS Navigation and MoveIt. With these established packages as a base, Fetch was able to quickly put together operational demos, and then iterate on an operating platform by developing custom plugins optimized for their specific use cases.
When considering how to use ROS as part of your company, it’s important to look closely at the packages you decide to incorporate, to make sure that they have a friendly license, good documentation, recent updates, built-in tests, and a standardized interface. Keeping track of all of this will make your startup life easier in the long run. As long as you’re careful, relying on ROS can make your company more agile, more productive, and ready to make a whole bunch of money off of the future of robotics.
~~~~~~~~~~~~~~~~~~~~
Next up: Ryan Gariepy (Clearpath Robotics)
It’s not sexy, but the next big thing for robots is starting to look like warehouse logistics. The potential market is huge, and a number of startups are developing mobile platforms to automate dull and tedious order fulfillment tasks. Transporting products is just one problem worth solving: picking those products off of shelves is another. Magazino is a German startup that’s developing a robot called Toru that can grasp individual objects off of warehouse shelves, a particularly tricky task that Magazino is tackling with ROS.
Moritz Tenorth is Head of Software Development at Magazino. In his ROSCon talk, Moritz describes Magazino’s Toru as “a mobile pick and place robot that works together with humans in a shared environment,” which is exactly what you’d want in an e-commerce warehouse. The reason that picking is a hard problem, as Moritz explains, is perception coupled with dynamic environments and high uncertainty: if you want a robot that can pick a wide range of objects, it needs to be able to flexibly understand and react to its environment; something that robots are notoriously bad at. ROS is particularly well suited to this, since it’s easy to intelligently integrate as much sensing as you need into your platform.
Magazino’s experience building and deploying their robots has given them a unique perspective on warehouse commercialization with ROS. For example, databases and persistent storage are crucial (as opposed to a focus on runtime), and real-time control turns out to be less important than being able to quickly and easily develop planning algorithms and reducing system complexity. Software components in the ROS ecosystem can vary wildly in quality and upkeep, although ROS-Industrial is working hard to develop code quality metrics. Magazino is also working on remote support and analysis tools, and trying to determine how much communication is required in a multi-robot system, which native ROS isn’t very good at.
Even with those (few) constructive criticisms in mind, Magazino says that ROS is a fantastic way to quickly iterate on both software and hardware in parallel, especially when combined with 3D printed prototypes for testing. Most importantly, Magazino feels comfortable with ROS: it has a familiar workflow, versatile build system, flexible development architecture, robust community that makes hiring a cinch, and it’s still (somehow) easy to use.
Next up: Michael Ferguson (Fetch Robotics)
Clearpath Robotics is best known for building yellow and black robots that are the research platforms you’d build for yourself; that is, if it wasn’t much easier to just get them from Clearpath Robotics. All of their robots run ROS, and Clearpath has been heavily involved in the ROS community for years. Now with Locus Robotics, Tom Moore spent seven months as an autonomy developer at Clearpath. He is the author and maintainer of the robot_localization ROS package, and gave a presentation about it at ROSCon 2015.
robot_localization is a general purpose state estimation package that’s used to give you (and your robot) an accurate sense of where it is and what it’s doing, based on input from as many sensors as you want. The more sensors that you’re able to use for a state estimate, the better that estimate is going to be, especially if you’re dealing with real-worldish things like unreliable GPS or hardware that flakes out on you from time to time. robot_localization has been specifically designed to be able to handle cases like these, in an easy to use and highly customizable way. It has state estimation in 3D space, gives you per-sensor message control, allows for an unlimited number of sensors (just in case you have 42 IMUs and nothing better to do), and more.
Tom’s ROSCon talk takes us through some typical use cases for robot_localization, describes where the package fits in with the ROS navigation stack, explains how to prepare your sensor data, and how to configure estimation nodes for localization. The talk ends with a live(ish) demo, followed by a quick tutorial on how to convert data from your GPS into your robot’s world frame.
The robot_localization package is up to date and very well documented, and you can learn more about it on the ROS Wiki.
Next up: Moritz Tenorth, Ulrich Klank, & Nikolas Engelhard (Magazino GmbH)
Matt Vollrath and Wojciech Ziniew work at an ecommerce consultancy called End Point, where they provide support for Liquid Galaxy; a product that’s almost as cool as it sounds. Originally an open source project begun by Google engineers on their twenty percent time, Liquid Galaxy is a data visualization system consisting of a collection of large vertical displays that wrap around you horizontally. The displays show an immersive (up to 270°) image that’s ideal for data presentations, virtual tours, Google Earth, or anywhere you want a visually engaging environment. Think events, trade shows, offices, museums, galleries, and the like.
Last year, End Point decided to take all of the ad hoc services and protocols that they’d been using to support Liquid Galaxy and move everything over to ROS. The primary reason to do this was ROS support for input devices: you can use just about anything to control a Liquid Galaxy display system, from basic touchscreens to Space Navigator 3D mice to Leap Motions to depth cameras. The modularity of ROS is inherently friendly to all kinds of different hardware.
Check out this week’s ROSCon15 video as Matt and Wojciech take a deep dive into their efforts in bringing ROS to bear for these unique environments.
Next up: Tom Moore (Clearpath Robotics)
ROS already comes with a fantastic built-in visualization tool called rviz, so why would you want to use anything else? At Southwest Research Institute, Jerry Towler explains how they’ve created a new visualization tool called Mapviz that’s specifically designed for the kind of large-scale outdoor environments necessary for autonomous vehicle development. Specifically, Mapviz is able to integrate all of the sensor data that you need on top of a variety of two-dimensional maps, such as road maps or satellite imagery.
As an autonomous vehicle visualization tool, Mapviz works just like you’d expect that it would, which Jerry demonstrated with several demos at ROSCon. Mapviz shows you a top-down view of where your vehicle is, and tracks it across a basemap that seamlessly pulls image tiles at multiple resolutions from a wide variety of local or networked map servers, including Open MapQuest and Bing Maps. Mapviz is, of course, very plugin-friendly. You can add things like stereo disparity feeds, GPS fixes, odometry, grids, pathing data, image overlays, projected laser scans, markers (including textured markers) from most sensor types, and more. It can’t really handle three dimensional data (although it’ll do two-and-a-half dimensions via color gradients), but for interactive tracking of your vehicle’s navigation and path planning behavior, Mapviz should offer most of what you need.
For a variety of non-technical reasons, SwRI hasn’t been able to release all of its tools and plugins as open source quite yet, but they’re working on getting approval as fast as they can. They’re also in the process of developing even more enhancements for Mapviz, and you can keep up to date with the latest version of the software on GitHub.
Next up: Matt Vollrath & Wojciech Ziniewicz (End Point)
BMW has been working on automated driving for the last decade, steadily implementing more advanced features ranging from emergency stop assistance and autonomous highway driving to fully automated valet parking and 360° collision avoidance. Several of these projects were presented at the 2015 Consumer Electronics Show, and as it turns out, the cars were running ROS for both environment detection and planning.
BMW, being BMW, has no problem getting new research hardware. Their latest development platform is the 335I G. This model comes with an advanced driver assistance system based around cameras and radar. The car has been outfitted with four low-profile laser scanners and one long-range radar, but otherwise, it’s pretty close (in terms of hardware) to what’s available in production BMWs.
Why did BMW choose to move from their internally developed software architecture to ROS? Michael explains how ROS’ reputation in the robotics research community prompted his team to give it a try, and they were impressed with its open source nature, distributed architecture, existing selection of software packages, as well as its helpful community. “A large user base means stability and reliability,” Michael says, “because somebody else probably already solved the problem you’re having.” Additionally, using ROS rather than a commercial software platform makes it much easier for BMW to cooperate with universities and research institutions.
Michael discusses the ROS software architecture that BMW is using to do its autonomous car development, and shows how the software interprets the sensor data to identify obstacles and lane markings and do localization and trajectory planning to enable full highway autonomy, based on a combination of lane keeping and dynamic cruise control. BMW also created their own suite of RQT and rviz plugins specifically designed for autonomous vehicle development.
After about two years of experience with ROS, BMW likes a lot of things about it, but Michael and his team do have some constructive criticisms: message transport needs more work (although ROS 2 should help with this), managing configurations for different robots is problematic, and it’s difficult to enforce compliance with industry standards like ISO and AUTOSAR, which will be necessary for software that’s usable in production vehicles.
Next up: Jerry Towler & Marc Alban (SwRI)
While Intel is best known for making computer processors, the company is also interested in how people interact with all of the computing devices that have Intel inside. In other words, Intel makes brains, but they need senses to enable those brains to understand the world around them. Intel has developed two very small and very cheap 3D cameras (one long range and one short range) called RealSense, with the initial intent of putting them into devices like laptops and tablets for applications such as facial recognition and gesture tracking.
Robots are also in dire need of capable and affordable 3D sensors for navigation and object recognition, and fortunately, Intel understands this, and they’ve created the RealSense Robotics Innovation Program to help drive innovation using their hardware. Intel itself isn’t a robotics company, but as Amit explains in his ROSCon talk, they want to be a part of the robotics future, which is why they prioritized ROS integration for their RealSense cameras.
A RealSense ROS package has been available since 2015, and Intel has been listening to feedback from roboticists and steadily adding more features. The package provides access to the RealSense camera data (RGB, depth, IR, and point cloud), and will eventually include basic computer vision functions (including plane analysis and blob detection) as well as more advanced functions like skeleton tracking, object recognition, and localization and mapping tools.
Intel RealSense 3D camera developer kits are available now, and you can order one for as little as $99.
Next up: Michael Aeberhard, Thomas Kühbeck, Bernhard Seidl, et al. (BMW Group Research and Technology)
Check out last week’s post: The Descartes Planning Library for Semi-Constrained Cartesian Trajectories
Descartes is a path planning library that’s designed to solve the problem of planning with semi-constrained trajectories. Semi-constrained means that the degrees of freedom of the path you need to plan are fewer than the degrees of freedom that your robot has. In other words, when planning a path, there are one or more “free” axes that your robot has to work with that can be moved any which way without disrupting the path. This can open up the planning space if you can utilize them creatively, which traditional robots (especially in the industrial space) usually can’t. This results in reduced workspaces and (most dangerous of all) increased reliance on human intuition during the planning process.
Descartes was designed to generate common sense plans, exhibiting similar characteristics to paths planned by a human. It can solve easy problems quickly, and difficult problems eventually, integrating hybrid trajectories and dynamic replanning. It’s easy to use, with a GUI that allows you to quickly set anchor points that the robot replans around, with visual confirmation of the new path. The second half of Shaun’s ROSCon talk is an in-depth explanation of Descartes’ interfaces and implementations intended for path planning fans (you know who you are).
As with many (if not most) of the projects being presented at ROSCon, Descartes is open source, and all of the development is public. If you’d like to try it out, the current stable release runs on ROS Hydro, and a tutorial is available on the ROS Wiki to help you get started.
Next up: Amit Moran & Gila Kamhi (Intel)
Check out last week’s post: Phobos — Robot Model Development on Steroids
To model a robot in rviz, you first need to create what’s called a Unified Robot Description Format (URDF) file, which is an XML-formatted text file that represents the physical configuration of your robot. Fundamentally, it’s not that hard to create a URDF file, but for complex robots, these files tend to be enormously complicated and very tedious to put together. At the University of Bremen, Kai von Szadkowski was tasked with developing a URDF model for a 60 degrees of freedom robot called MANTIS (Multi-legged Manipulation and Locomotion System). Kai got a bit fed up with the process and developed a better way of doing it, called Phobos.
http://robotik.dfki-bremen.de/en/research/robot-systems/mantis.html
Phobos is an add-on for a piece of free and open-source 3D modeling and rendering software called Blender. Using Blender, you can create armatures, which are essentially kinematic skeletons that you can use to animate a 3D character. As it turns out, there are some convenient parallels between URDF models and 3D models in Blender: the links and joints in a URDF file equate to armatures and bones in Blender, and both use similar hierarchical structures to describe their models. Phobos adds a new toolbar to Blender that makes it easy to edit these models by adding links, motors, sensors, and collision geometries. You can also leverage Blender’s Python scripting environment to automate as much of the process as you’d like. Additionally, Phobos comes with a sort of “robot dictionary” in Python that manages all of the exporting to URDF for you.
Since the native URDF format can’t handle all of the information that can be incorporated into your model in Blender, Kai proposes an extended version of URDF called SMURF (Supplemental Mostly Universal Robot Format) that adds YAML files to a URDF, supporting annotations for sensor, motors, and anything else you’d like to include.
If any of this sounds good to you, it’s easy to try it out: Blender is available for free, and Phobos can be found on GitHub.
The ROS Industrial Consortium was established four years ago as a partnership between Yaskawa Motoman Robotics, Southwest Research Institute (SwRI), Willow Garage, and Fraunhofer IPA. The idea was to provide a ROS-based open-source framework for robotics applications, designed to make it easy (or at least possible) to leverage advanced ROS capabilities (like perception and planning) in industrial environments. Basically, ROS-I adds models, libraries, drivers, and packages to ROS that are specifically designed for manufacturing automation, with a focus on code quality and end user reliability.
Mirko Bordignon from Fraunhofer IPA opened the final ROSCon 2016 keynote by pointing out that ROS is still heavily focused on research and service robotics. This isn’t a bad thing, but with a little help, there’s an enormous opportunity for ROS to transform industrial robotics as well. Over the past few years. The ROS Industrial Consortium has grown into two international consortia (one in America and one in Europe), comprising over thirty members that provide financial and managerial support to the ROS-I community.
To help companies get more comfortable with the idea of using ROS in their robots, ROS-I holds frequent training sessions and other outreach events. “People out there are realizing that at least they can’t ignore ROS, and that they actually might benefit from it,” Bordignon says. And companies are benefiting from it, with ROS starting to show up in a variety of different industries in the form of factory floor deployments as well as products.
Bordignon highlights a few of the most interesting projects that the ROS-I community is working on at the moment, including a CAD to ROS workbench, getting ROS to work on PLCs, and integrating the OPC data protocol, which is common to many industrial systems.
Before going into deeper detail on ROS-I’s projects, Shaun Edwards from SwRI talks about how the fundamental idea for a ROS-I consortium goes back to one of their first demos. The demo was of a PR2 using 3D perception and intelligent path planning to pick up objects off of a table. “[Companies were] impressed by what they saw at Willow Garage, but they didn’t make the connection: that they could leverage that work,” Edwards explains. SwRI then partnered with Yaskawa to get the same software running on an industrial arm, “and this alone really sold industry on ROS being something to pay attention to,” says Edwards.
Since 2014, ROS-I has been refining a general purpose Calibration Toolbox for industrial robots. The goal is to streamline an otherwise time-consuming (and annoying) calibration process. This toolbox covers robot-to-camera calibration (with both stationary and mobile cameras), as well as camera-to-camera calibration. Over the next few months, ROS-I will be releasing templates for common calibration use cases to make it as easy as possible.
Path planning is another ongoing ROS-I project, as is ROS support for CANOpen devices (to enable IoT-type networking), and integrated motion planning for mobile manipulators. ROS-I actually paid the developers of the ROS mobile manipulation stack to help with this. “Leveraging the community this way, and even paying the community, is a really good thing, and I’d like to see more of it,” Edwards says.
To close things out, Edwards briefly touches on the future of ROS-I, including the seamless fusion of 3D scanning, intelligent planning, and dynamic manipulation, which is already being sponsored by Boeing and Caterpillar. If you’d like to get involved in ROS-I, they’d love for you to join them, and even if you’re not directly interested in industrial robotics, there are still plenty of opportunities to be part of a more inclusive and collaborative ROS ecosystem.
Next up: Kai von Szadkowski (University of Bremen)
Check out last week’s post: MoveIt! Strengths, Weaknesses, and Developer Insight
Dave Coleman has worked in (almost) every robotics lab there is: Willow Garage, JSK Humanoids Lab in Tokyo, Google, UC Boulder, and (of course) OSRF. He’s also the owner of PickNik, a ROS consultancy that specializes in training robots to destructively put packages of Oreo cookies on shelves. Dave has been working on MoveIt! since before it was first released, and to kick off the second day of ROSCon, he gave a keynote to share everything he knows about motion planning in ROS.
MoveIt! is a flexible and robot agnostic motion planning framework that integrates manipulation, 3D perception, kinematics, control, and navigation. It’s a collaboration between lots of people across many different organizations, and is the third most popular ROS package with a fast-growing community of contributors. It’s simple to set up and use, and for beginners, a plugin lets you easily move your robot around in Rviz.
As a MoveIt! pro, Dave offers a series of pro tips on how to get the most out of your motion planner. For example, he suggests that researchers try using C++ classes individually to avoid getting buried in a bunch of layered services and actions. This makes it easier to figure out why your code doesn’t work. Dave also describes his experience in the Amazon Picking Challenge, held last year at ICRA in Seattle.
MoveIt! is great, but there’s still a lot of potential for improvement. Dave discusses some of the things that he’d like to see, including better reliability (and more communicative failures), grasping support, and, as always, more documentation and better tutorials. A recent MoveIt! community meeting resulted in a future roadmap that focuses on better humanoid kinematic support and support for other types of planners, as well as integrated visual servoing and easy access to calibration packages.
Dave ends with a reminder that progress is important, even if it’s often at odds with stability. Breaking changes are sometimes necessary in order to add valuable features to the code. As with much of ROS, MoveIt! depends on the ROS community to keep it capable and relevant. If you’re an expert in one of the components that makes MoveIt! so useful, you should definitely consider contributing back with a plug-in from which others can take advantage.
Next up: Mirko Bordignon (Fraunhofer IPA), Shaun Edwards (SwRI), Clay Flannigan (SwRI), et al.
Check out last week’s post: Real-time Performance in ROS 2
Jackie Kay was upgraded from OSRF intern to full-time software engineer in 2014. Her background includes robotics education and path planning for autonomous lunar rovers. More recently, she’s been working on bringing real-time computing to ROS 2.
Real-time computing isn’t about computing at a certain speed— it’s about computing on schedule. It means that your system can return data reliably and on time, in situations where responding late is usually bad thing; and sometimes a really bad thing. Hard real-time computing is important in safety critical applications (like nuclear reactors, spacecraft, and autonomous vehicles), when taking too long thinking about something could result in a figurative or literal crash — or both. Soft real-time computing is a bit more forgiving, in that things running behind have a cost, but the data are still usable, as with packets arriving out of order while streaming video. And in between there’s firm real-time computing, where missing deadlines is definitely bad but nothing explodes (or things only explode a little bit), like on a robotic assembly line.
Making a system that’s adaptable and reliable, especially in the context of commercialization, often requires real-time computing, and this is why integrating real-time compatibility is one of the primary goals of ROS 2. Jackie’s keynote addresses many of the technical details underlying the ROS 2 real-time approach, including scheduling, memory management, node design, and communications strategies. To illustrate the improvements that ROS 2 has over ROS, Jackie shares benchmarking results of a ROS 2 demo running in real-time, showing that even under stress, implementing a high performance soft real-time system in ROS 2 looks promising.
To try real-time computing in ROS 2 for yourself, you can download an Alpha release and play around with a demo here: https://github.com/ros2/ros2/wiki/Real-Time-Programming
ROSCon 2015 Hamburg: Day 1 – Jackie Kay: Real-time Performance in ROS 2 from OSRF on Vimeo.
Next up: Dave Coleman (University of Colorado Boulder)
Check out last week’s post: State of ROS 2
ROS has been an enormously important resource for the robotics community. It turned eight years old at the end of 2015, and is currently on its ninth official release. As ROS adoption has skyrocketed (especially over the past several years), OSRF, together with the community, have identified many specific areas of the operating system that need major overhauls in order to keep pace with maturing user demand. Dirk Thomas, Esteve Fernandez, and William Woodall from OSRF gave a preview at ROSCon 2015 of what to expect in ROS 2, including multi-robot systems, commercial deployments, microprocessor compatibility, real time control, and additional platform support.
The OSRF team shows off many of the exciting new ROS 2 features in this demo-heavy talk, including distributed message passing through DDS (no ROS master required), performance boosts for communications within nodes, quality of service improvements, and ways of bridging ROS 1 and ROS 2 so that you don’t have to make the leap all at once. If you’d like to make the leap all at once anyway, the Alpha 1 release of ROS 2 has been available since last September, and Thomas ends the talk with a brief overview of the roadmap leading up to ROS 2’s Alpha 2 release. As of April 2016, ROS 2 is on release Alpha 5 (“Epoxy”), and you can keep up-to-date on the roadmap and release schedule here.
ROSCon 2015 Hamburg: Day 1 – Dirk Thomas: State of ROS 2 – demos and the technology behind from OSRF on Vimeo.
Next up: Jackie Kay (OSRF) & Adolfo Rodríguez Tsouroukdissian (PAL Robotics)
Check out last week’s post: Lightning Talk highlights
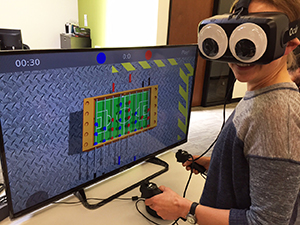
OSRF Software Engineer Louise Poubel was recently asked to write an article about her upcoming presentation at the IEEE Women in Engineering International Leadership Conference on open source robotics for Scientific Computing magazine. Check out the excerpt, below.
These are exciting times for robotics. In the past few years, we’ve started seeing robotic products make their way into our daily lives. We’re buying robotic vacuum cleaners and toy quadcopters. If you’re lucky enough, you’ve seen a robot dancing at a presentation, had a robot give you information at a store, or received a robot delivery at a hotel. Things that seemed like science fiction just a few years ago are looking like they could become reality in our lifetimes. We can more clearly see a future with package delivery drones and self-driving cars.
From ros.org:
Today may be April 1st, but this is no April Fools’ Joke: ROSCon 2016 will take place in Seoul, South Korea between October 8th and 9th! We’re very excited to get the ROS community together again to share all of the exciting work that has happened over the last year. ROSCon will directly precede IROS, which is in nearby Daejeon, Korea this year. If you’re already planning to attend IROS, just tack on a couple extra days and join us in Seoul!
Stay tuned to the ROSCon 2016 website for updates and submission deadlines. We look forward to seeing you in Seoul later this year!
The growing popularity of ROSCon means that it’s not always possible to schedule presentations for everyone that wants to give one. In addition, many people have projects that they’d like to share, but don’t need a full twenty minutes to present. That’s why forty minutes of each day at ROSCon are set aside for any attendee to present anything they want; all in a heartlessly rigid three-minutes-or-less format. Here are a few highlights:
Victor is the CTO and co-founder of Erle Robotics. The Erle-Brain 2 is an open source, open hardware controller for robots based on the Raspberry Pi 2. It runs ROS, will support ROS 2, and can be used as the brain for all kinds of different robots, including the Erle Spider, a slightly misnamed hexapod that you can buy for €599.
Andreas works on robot-assisted surgery using ROS at Karlsruhe Institute of Technology. KIT has a futuristic operating room full of robots and sensors designed to help human doctors and nurses through positional tracking, augmented reality, and direct robotic assistance. Andreas is also interested in collaborating with people on ROS Medical, which doesn’t exist yet but has a really cool logo anyway.
Through the efforts of Jochen Sprickerhof and Leopold Avellaneda, there are now ROS packages available upstream in Debian unstable and Ubuntu Xenial that can be installed from the main Debian and Ubuntu repositories. The original ROS packages have been modified to follow Debian guidelines, which includes splitting packages into multiple pieces, changing names in some cases, installing to /usr according to FHS guidelines, and using soversions on shared libraries.
ROSCon 2015 Hamburg: Day 1 – Lightning Talks from OSRF on Vimeo.
Next up: Dirk Thomas, William Woodall (OSRF) & Esteve Fernandez
Check out last week’s post: Ralph Seulin of CNRS
The first step in doing something new, useful, and exciting with ROS is — without exception — learning how to use ROS. Ralph Seulin is part of CNRS in France, which, along with universities in Spain and Scotland, collaboratively offer a masters course in robotics and computer vision that includes a focus on ROS. Over four semesters, between 30 and 40 students go through the program. In this talk, Seulin discusses how ROS is taught to these students, as well as what kinds of research they leverage that knowledge into.
Before Seulin’s group could effectively teach ROS to students, they had to learn ROS for themselves. This was a little bit more difficult way back in 2013 than it is now, but they took advantage of the ROS Wiki , read all the books on ROS they could get ahold of, and of course made sure to attend ROSCon. From there, Seulin developed a series of tutorials for his students, starting with simulations and ending up with practical programming in ROS on the TurtleBot 2. Ultimately, students spend 250 hours on a custom robotics project that integrates motion control, navigation and localization, and computer vision tasks.
Seulin also makes use of ROS in application development. One of those applications is in precision vineyard agriculture because, as Seulin explains, “we come from Burgundy.” Using lasers mounted on a tractor to collect and classify 3D data, a prototype robot tractor can be used to analyze vineyard canopies and estimate leaf density. With this information, vineyards can dynamically adjust the application of agricultural chemicals, using just the right amount and only where necessary. Better for plants, better for humans, thanks to ROS.
ROSCon 2015 Hamburg: Day 1 – Ralph Seulin: ROS for education and applied research: practical experiences from OSRF on Vimeo.
Next up: Dirk Thomas, William Woodall (OSRF) & Esteve Fernandez
Check out last week’s post: Daniel Di Marco of Bosch
Daniel Di Marco is part of Deepfield Robotics, a 20 person agricultural robotics startup within Bosch. Deepfield makes robots that can, among other things, visually locate and then brutally destroy weeds by pounding them into the dirt. In order to deliver software to their customers, Deepfield decided to create its own build farm, and Di Marco’s ROSCon presentation explains why managing a build farm internally is a good idea for a startup.
A build farm is a system that can automatically create Debian packages for you, while running integrated unit tests and generating documentation. OSRF already supports all of ROS with its own build farm, so why would anyone want to set up a build farm for themselves instead? Simple, says Di Marco: it’s something you should do if you actually want to make money with your robots.
If ROS is a part of your thriving robotics business, running a build farm allows you to do several important things. First, since you’re hosting your code on your own servers, you can maintain control over it, protecting your intellectual property and any proprietary components that you may be using. Second, you can use your build farm to distribute your packages directly to your customers, who are (presumably) paying you, and not to just anybody who swings by and wants to snag them. And lastly, you can decide what versions of different packages you want to keep using, rather than being subjected to upgrades that may not work as well.
Di Marco concludes by discussing why Docker is an easy and reliable foundation for a build farm, and how to get it set up. Most of the process has been scripted, thanks to some hard work at OSRF, and Di Marco walks us through an initial deployment to help you get your own build farm up and running.
ROSCon 2015 Hamburg: Day 1 – Daniel Di Marco: Docker-based ROS Build Farm from OSRF on Vimeo.
Next up: Ralph Seulin, Raphael Duverne, and Olivier Morel (CNRS – Univ. Bourgogne Franche-Comte)
Check out last week’s post: Ruffin White of Georgia Tech
During her Outreachy internship at Open Source Robotics Foundation, Nadya Ampilogova worked on a TurtleBot User Experience project.
The goal was to extend learn.turtlebot.com with lessons taking advantage of the simulation environment available in Gazebo. The use of robot simulation instead of a physical robot makes the tutorials accessible to a larger audience. All examples are with TurtleBot because it is a common way to start learning robotics. Many universities use the TurtleBot when teaching introductory robotics courses. In creating the lessons, Nadya focused on making the content engaging and accessible by integrating images and videos. The topics include how to install software, setup tools, write your first program to control a TurtleBot and lots more. Upon completion of this tutorial you will be able to create a TurtleBot application and test it in simulation.
The result of the project is twenty lessons about TurtleBot in simulation. They cover not only basic features but also give a brief overview of more complicated subjects. This tutorial makes studying robotics easier for people who may not have access to a real robot all of the time but who have a computer that can run the simulator.
You can find the tutorial on learn.turtlebot.com. This internship was a part of the Outreachy Program. You can read more about Nadya’s internship on her blog.
Do you want to spend the summer coding on Gazebo or ROS? OSRF has been accepted for GSoC and we are looking for talented students who want to participate as remote interns.
Accepted students will participate in real-world software development,
contributing to robotics projects and engaging with the global robotics community, all while
getting paid.
Check out our GSoC site and don’t forget to visit our ideas page, which lists projects that we’re interested in. Feel free to ask questions and propose suggestions at gsoc@localhost. The student application period starts March 14th.
Get ready for a robotics coding summer!
Every day, roboticists write code that helps their robots do amazing new things. And every day, this code remains virtually useless to anyone else, because outside distribution is such a hassle. This isn’t a problem that’s unique to robotics: distributing software in general is tricky to do reliably and well, since you’re never sure what kind of system your end user has. Robotics magnifies this challenge because of the unpredictably exotic mix of hardware and software that makes up a given robot doing a given thing at a given time, combined with the extraordinarily rapid pace of advancement. Given all of this complexity, how do you make code that’s portable and robust and useful to as many people as possible?
Ruffin White, a graduate research assistant at the Institute for Robotics and Intelligent Machines at Georgia Tech (and ex-OSRF intern), discusses how Linux containers can help manage some of these issues. A Linux container is a software package that lives somewhere in between a complete virtual machine and bare code. Using a service called Docker, you can wrap up code, distros, libraries, drivers, and all the other dependencies necessary for your code to function into portable containers that still use the underlying kernel on whatever they end up getting installed on. This allows the container to be very lightweight, while also providing adaptability to local infrastructure.
White gives three different demonstrations of how Docker containers can come in handy for robots in a ROS environment. In the first, he shows how in an educational context, you can use containers to provide a preset environment that can be safely experimented in without any risk. Second, for researchers, containers can allow you to easily test different algorithms, provides a way to publish code in a repeatable and reproducible way, and makes collaborative research much simpler. And finally, industry can take advantage of containers to deploy multiple nodes on different cloud services, or to manage entire swarms of robots at once.
If you want to give ROS a try inside Docker containers, the offical repo can be found at https://hub.docker.com/_/ros/.
ROSCon 2015 Hamburg: Day 1 – Ruffin White: ROS + Docker from OSRF on Vimeo.
Next up: Dejan Pangercic, Daniel Di Marco, and Arne Hamann (Robert Bosch)
Check out last week’s post: Morgan Quigley of OSRF
Morgan Quigley is first author of the authoritative 2009 workshop paper on the Robot Operating System. He’s been Chief Architect at OSRF since 2012, and in 2013, MIT Tech Review awarded Quigley a prestigious TR35 award. In addition to software development, Quigley knows a thing or two about hardware: he helped Sandia National Labs design high-efficiency bipeds for DARPA, and he also gave Sandia a hand with the development of their sensor-rich, high-DOF robotic hand.
Quigley’s ROSCon talk is focused on small (but not tiny) microcontrollers: 32-bit MCUs running at a few hundred megahertz or so, with USB and Ethernet connections. While these types of processors can’t power smartphones or run Linux, they are found in many popular embedded systems, such as the Pixhawk PX4 autopilot. Microcontrollers like these would be much easier to integrate if they all operated under a standardized communication protocol, but there are enough inconvenient hoops that have to be jumped through to run ROS on them that it’s usually not worth the hassle.
ROS 2, which doesn’t rely on a master node and has native UDP message passing, promises to work much better than ROS on distributed embedded systems. To make ROS 2 fit on a small microcontroller, Quigley demonstrates a few applications of FreeRTPS, a portable, embedded-friendly implementation of the network protocol underlying ROS 2.
After showing the impressive results of some torture tests on a Discovery board, Quigley talks about what’s coming next, including a focus on even smaller microcontrollers (like Arduino boards that communicate over USB rather than Ethernet). Eventually, Quigley suggests that ROS 2 will be small and light enough to run on the microcontrollers inside sensors and actuators themselves, simplifying real-time control.
ROSCon 2015 Hamburg: Day 1 – Morgan Quigley: ROS 2 on “small” embedded systems from OSRF on Vimeo.
Next up: Ruffin White of Institute for Robotics & Intelligent Machines at Georgia Tech
Check out last week’s post: Roman Bapst of ETH Zurich and PX4
PX4 is a flight control software stack for autonomous aerial robots that describes itself as “rocket science straight from the best labs, powering anything from racing to cargo drones.” One of these labs is at ETH Zurich, where Roman Bapst serves on the faculty. Bapst works on computer vision and actively contributes to the PX4 autopilot platform.
Bapst starts out by describing some of the great things about the PX4 autopilot: it’s open source, open hardware, and supported by the Linux Foundation’s Dronecode Project, which provides a framework under which developers can contribute to an open source standard platform for drones. PX4 runs on 3DRobotics’ Pixhawk hardware, and once you hook up some sensors and servos, it will autonomously pilot nearly anything that flies – from conventional winged aircraft to multicopters to hybrids.
One of PX4’s unique features is its modularity, which is fundamentally very similar in structure to ROS. This means that you can run PX4 modules as ROS nodes, while taking advantage of other ROS packages under PX4 to do things like vision based navigation and control. Additionally, it lets you easily simulate PX4-based drones within Gazebo, which, unlike real life, has a free reset button that you can push after a crash.
The PX4 team is currently getting their software modules running as ROS nodes on Qualcomm’s Snapdragon Flight drone development platform, which would be a very capable and (affordable) way of getting started with a custom autonomous drone.
ROSCon 2015 Hamburg: Day 1 – Roman Bapst: ROS on DroneCode Systems from OSRF on Vimeo.
Next up: Morgan Quigley of OSRF
Check out last week’s post: Gary Servín of Ekumen
What’s ROS android_ndk? Why should you care? How does it work? Gary Servín is with Ekumen, an engineering and software consulting company based in Buenos Aires, Argentina that specializes in ROS, web and Android development. With the backing of Qualcomm and OSRF, Ekumen has been trying to make it both possible and easy to run ROS applications on small Android devices like tablets and cellphones using Android’s native language development kit.
As Gary explains, the increasing performance, decreasing cost, and overall ubiquity of Android devices make them ideal brains for robots. The tricky part is getting ROS packages to play nice with Android, which is where ROS android_ndk comes in: it’s a set of scripts that Ekumen is working on to make the process much easier. Unlike rosjava, ROS android_ndk gives you access to 181 packages from the desktop variant of ROS, with the ability to run native ROS nodes directly.
Ekumen is actively working on this project, with plans to incorporate wrappers for rosjava, actionlib implementation, and support for ROS 2. In the meantime, there’s already a set of tutorials on ROS.org that should help you get started.
ROSCon 2015 Hamburg: Day 1 – Gary Servin: ROS android_ndk: What? Why? How? from OSRF on Vimeo.
Next up: Lorenz Meier & Roman Bapst of ETH Zurich and PX4
Check out last week’s post: Stefan Kohlbrecher of Technische Universitaet Darmstadt
Stefan’s early research using tiny soccer-playing humanoid robots at Technische Universität Darmstadt in Germany prepared him well for software development on much larger humanoid robots that don’t play soccer at all. From the Darmstadt Dribblers RoboCup team to the DARPA Robotics Challenge Team ViGIR, Stefan has years of experience with robots that need to walk on two legs and do things while not falling over (much).
Almost all of the software that Team ViGIR used to control its ATLAS robot (named Florian) was ROS based. Stefan credits both the team’s prior experience with ROS, ROS’s existing software base, and its vibrant community for why Team ViGIR made the choice to go with ROS from the very beginning. Controlling the ATLAS robot is exceedingly complex, and Stefan takes us through the software infrastructure that Team ViGIR used during the DRC; from basic perception to motion planning to manipulation and user interfaces.
With lots of pictures and behind-the-scenes videos, Stefan describes how Team ViGIR planned to tackle the challenging DRC Finals course. The team used both high-level autonomy and low-level control, with an emphasis on dynamic, flexible collaboration between robot and operator. Stefan narrates footage of both of Florian’s runs at the DRC Finals; each was eventful, but we won’t spoil it for you.
To wrap up his talk, Stefan describes some of the lessons that Team ViGIR learned through their DRC experience: about ROS, about ridiculously complex humanoid robots, and about participating in a global robotics competition.
ROSCon 2015 Hamburg: Day 1 – Stefan Kohlbrecher: An Introduction to Team ViGIR’s Open Source Software and DRC Post Mortem from OSRF on Vimeo.
Next up: Gary Servin of Creativa77
Check out last week’s post: Mark Shuttleworth of Canonical
In 2004, Canonical released the first version of Ubuntu, a Debian-based open source Linux OS that provides one of the main operational foundations of ROS. Canonical’s founder, Mark Shuttleworth, was CEO of the company until 2009, when he transitioned to a leadership role that lets him focus more on product design and partnerships. In 2002, Mark spent eight days aboard the International Space Station, but that was before the ISS was home to a ROS-powered robot. He currently lives on the Isle of Man with 18 ducks and an occasional sheep. Ubuntu was a platinum co-sponsor of ROSCon 2015, and Mark gave the opening keynote on developing a business in the robot age.
Changes in society and business are both driven by changes in technology, Mark says, encouraging those developing technologies to consider the larger consequences that their work will have, and how those consequences will result in more opportunities. Shuttleworth suggests that robotics developers really need two things at this point: a robust Internet of Things infrastructure, followed by the addition of dynamic mobility that robots represent. However, software is a much more realistic business proposition for a robotics startup, especially if you leverage open source to create a developer community around your product and let others innovate through what you’ve built.
To illustrate this principle, Mark shows a live demo of a hexapod called Erle-Spider, along with a robust, high-level ‘meta’ build and packaging tool called Snapcraft. Snapcraft makes it easy for users to install software and for developers to structure and distribute it without having to worry about conflicts or inter-app security. The immediate future promises opportunities for robotics in entertainment and education, Mark says, especially if hardware, ROS, and an app-like economy can come together to give developers easy, reliable ways to bring their creations to market.
ROSCon 2015 Hamburg: Day 1 – Mark Shuttleworth: Commercial models for the robot generation from OSRF on Vimeo.
Next up: Stefan Kohlbrecher of Technische Universitaet Darmstadt
Check out last week’s post: OSRF’s Brian Gerkey
ROSCon is an annual conference focused on ROS, the Robot Operating System. Every year, hundreds of ROS developers of all skill levels and backgrounds, from industry to academia, come together to teach, learn, and show off their latest projects. ROSCon 2015 was held in Hamburg, Germany. Beginning today and each week thereafter, we’ll be highlighting one of the talks presented at ROSCon 2015.
Brian Gerkey is the CEO of the Open Source Robotics Foundation, which oversees core ROS development and helps to coordinate the efforts of the ROS community. Brian helped found OSRF in 2012, after directing open source development at Willow Garage.
Unless you’d like to re-live the ROSCon Logistics Experience, you can skip to 5:10 in Brian’s opening remarks, where he provides an overview of ROSCon attendees and ROS user metrics that shows how diverse the ROS community has become. Brian touches on what’s happened with ROS over the last year, along with the future of ROS and OSRF, and what we have to look forward to in 2016. Brian also touches on DARPA’s Robotics Fast Track program, which has a submission deadline of January 31, 2016.
ROSCon 2015 Hamburg: Day 1 – Opening Remarks from OSRF on Vimeo.
Next up, Mark Shuttleworth from Canonical.
OSRF CEO, Brian Gerkey, was recently asked to contribute his thoughts as part of O’Reilly Media’s recent Next: Economy Summit. Called “WTF”, the event tackled the issues of how work, business and society face massive technology-driven change. His contribution was entitled: “Looking Forward to the Robot Economy”. Check out the excerpt, below.
Let’s talk about robots. In the near future, robots will learn how to do more and more of the things that we humans are used to doing ourselves. Watching the progress of robotic technology over the last several years has caused a wild and so far mostly theoretical economic panic about the future of humans in the workplace. But despite the flood of articles suggesting that the human worker is doomed, robots are almost certainly not going to take your job anytime soon.
![]()
Open Source Robotics Foundation is joining DARPA and Tandem National Security Innovations on the road to spread the word about DARPA’s Robotics Fast Track Program. We’re proud to support the opportunity for startups and roboticists to receive $150,000 to build a robot prototype.
Join us in Seattle, Redwood City, Livermore, San Diego (or all four!) to learn more about the innovative program designed to make it easier to get projects funded in weeks, not months or years by the Pentagon’s leading advanced research lab. Whether you’re a roboticist, technologist, or entrepreneur, you’ll want to join us for this rare opportunity. The events will begin with an informational session to discuss the program followed by the opportunity for attendees to meet privately with representatives from DARPA, OSRF and TandemNSI to ask specific questions about individual projects. Food and drink will be provided at each of our free events so come out and join us.
Date/Time: Nov. 17, 2015 from 6:30 p.m. to 8:30 p.m.
Location: The Maker’s Space (92 Lenora Street, Seattle, WA 98121)
Register Here
Lunch in Livermore
Date/Time: Nov. 18, 2015 from 11:30 a.m. to 1 p.m.
Location: i-GATE Innovation Hub (2324 Second St, Livermore, CA 94550)
Register Here
Evening in Redwood City
Date/Time: Nov. 18, 2015 from 6:30 p.m. to 8:30 p.m.
Location: TechShop Mid Peninsula (2415 Bay Road, Redwood City, CA 94063)
Register Here
Date/Time: Nov. 19, 2015 from 6:30 p.m. to 8:30 p.m.
Location: The Basement — UC San Diego (9500 Gilman Dr., La Jolla, CA 92093)
Register Here
To learn even more about the program, the Robotics Fast Track website has specifics on how to apply, and more details on the technologies that DARPA seeks. We look forward to seeing you at one of the West Coast events!

Happy Halloween from OSRF! Our commitment to wearing costumes at work is as strong as our commitment to open source software!

This year’s ROSCon is nearly upon us. If you haven’t yet made plans to get yourself to Hamburg, then you are out of luck as this year’s ROSCon has sold out. The good news is that we are live streaming ROSCon presentations free of charge, courtesy of Qualcomm.
Click here for the live stream beginning 9:00 a.m. CEST, 2015, 12:00 a.m. PDT or 3:00 a.m. EDT on October 3, 2015.
All sessions will also be recorded and made available for viewing in the near future. Follow @OSRFoundation for announcements about their availability.
A final thank you to Platinum Sponsors Fetch Robotics and Ubuntu; Gold Sponsors 3D Robotics, Bosch, Clearpath Robotics, GaiTech, Magazino, NVIDIA, Qualcomm, Rethink Robotics, Robotis, Robotnik, ROS-Industrial, Shadow Robot Company, SICK and Synapticon; and Silver Sponsors Erle Robotics and Northwestern University, McCormick School of Engineering.
Check out the program here.
If you’re attending in-person, we look forward to seeing you soon!
During his internship with OSRF, Mike Kasper developed a new ignition-robotics rendering library. The key feature of this library is that it provides an abstract render-engine interface for building and rendering scenes. This allows the library to employ multiple underlying render engines. The motivation for this work was to extend Gazebo’s rendering capabilities to provide near photo-realistic imagery for simulated camera sensors. This could then be utilized for the development and testing of perceptions algorithms.
As Gazebo currently employs the Object-Oriented Graphics Rendering Engine (OGRE), an OGRE-based implementation has been added to the ignition-rendering library. Additionally, a render-engine using NVIDIA’s OptiX ray-tracing engine has also been implemented. The current OptiX-based render-engine employs simple ray-tracing techniques, but will employ physically based path-tracing techniques in the future to generate photo-realistic imagery.
The following videos give an overview of the libraries’ current capabilities:

OSRF has been intimately involved in the DARPA Robotics Challenge (DRC) from the beginning in June 2012, when we started getting Gazebo into shape to meet the simulation needs of DRC teams, including hosting the Virtual Robotics Challenge (VRC) in June 2013. So the DRC Finals this past weekend was a special event for us, representing three years of work from our team.
We were especially excited to see widespread use of both ROS and Gazebo during the two-day competition. Walking through the team garage area during the finals, we saw many screens showing rviz and other ROS tools, and even one with a browser open to ROS Answers (some last-minute debugging, we assume).
We talked with several teams who used Gazebo in their software development and testing, including teams using robots other than the Atlas that we modeled for the VRC. In the post-DRC workshop on Sunday, both first-place Team KAIST and third-place Tartan Rescue discussed their use of Gazebo, in particular for developing solutions to fall-recovery and vehicle egress. That’s one of the reasons we work on Gazebo: to give roboticists the tools they need to safely develop robot software to handle unsafe situations, without risk to people or hardware.
Based on our observations at the competition and communications with team members, out of the 23 DRC Finals teams, we count 18 teams using ROS and 14 teams using Gazebo. We couldn’t be happier to see such impact from open source robot software!
Join OSRF at the biggest robotics event of the year, the DARPA Robotics Challenge (DRC) Finals! If you’re looking for some excitement on June 5 and 6, head on over to the Fairplex in Pomona, Calif. for two days of free robotics competition and demonstrations. OSRF will be at the Expo in full force with 4 interactive demos and more stickers than you have surfaces to stick them on.
The DRC Finals will be divided into two parts. The Technology Expo will offer dozens of interactive exhibits and demonstrations, and the competition Grandstands will provide an excellent view as 25 robotics organizations from around the world compete for $3.5 million in prizes.
We’ve worked on the DARPA Robotics Challenge since it kicked off in 2012. In June 2013, we helped host the DARPA Virtual Robotics Challenge which awarded 8 Boston Dynamics Atlas robots to the most successful competitors. In December 2013, we participated in the Expo at the DRC Trials in Florida. It has been thrilling to take part in such an impressive, impactful robotics program, and we can’t wait to witness the grand conclusion in just one week.
If you’re in the Pomona area next Friday and Saturday, we’d love to see you at the OSRF booth (#14). Just hang a left as you enter the Expo area, and you’ll see us a few booths down on the right side. We’ll have a handful of demos for you to check out, including simulated foosball and drone flying, a motion capture system with haptic feedback, and a bale of Turtlebots you can drive around.
For more information, check out the DRC Finals website: http://www.theroboticschallenge.org/.
Here’s a map of the Expo area:

![]()
We’re excited to announce that OSRF and BIT Systems are seeking innovative and revolutionary robotics projects for the Robotics Fast Track (RFT) effort, sponsored by the Defense Advanced Research Projects Agency (DARPA).
The goals of Robotics Fast Track are:
Learn more and apply at rft.osrfoundation.org!
This piece was written as a precursor to the Silicon Valley Robotics panel titled “Women in Robotics: Challenge or Opportunity?” Join us at IDEO’s San Francisco office on Wednesday, April 29 at 7 pm to hear from women in a wide range of robotics roles. Tickets can be purchased here.

Let me get the basic statistics out of the way. It is widely acknowledged and reported that women are grossly underrepresented in the STEM fields. The U.S. Department of Commerce’s Economics and Statistics Administration (ESA) reported in 2011 that women hold less than 25% of the country’s STEM jobs. Women comprise a mere 17% of Google’s technology workforce; Apple sits at 20%. There are many factors at play, from what the ESA describes as the lack of “family-friendly flexibility in the STEM fields,” to gender discrimination and stereotyping, to the shortage of strong female role models.
It is the latter point that I wish to touch on first, because indeed, I found my niche in robotics due in large part to the outstanding mentor I found in Leila Takayama. I met Leila during an internship at Willow Garage, back when I was struggling to apply a psychology degree to a burgeoning interest in badass robots. I began at Willow as an operations intern. I did everything from inventory management, to lunch clean-up, to multimeter measurements on robot stress tests, to light switch labeling. As much as label making satisfies my deepest desire for order, I saw everyone around me designing and building the PR2. At that time, the PR2 was arguably the world’s most sophisticated personal robot. I wanted in on the action. That’s about as far as I got, though – a keen interest in robots – until Leila joined and introduced me to Human-Robot Interaction.
Without a doubt, it was my experience as Leila’s research assistant, her advice and encouragement, and the challenges she emboldened me to take on, that opened my eyes to how I could make a place for myself in the world of robotics. With Leila as my role model and mentor, I conducted HRI research, co-authored a paper, gradually become comfortable surrounded by a nearly all-male engineering team, and shed the sometimes crippling doubt around whether I had what it took to work in a highly technical field. Witnessing Leila successfully navigate this male-dominated industry cemented in me the confidence I needed to pursue a career in robotics, not only as a woman, but as a designer and researcher.
At Leila’s urging, I applied and was accepted to Carnegie Mellon University’s Human-Computer Interaction masters program. This turned out to be the second most influential factor in getting me to where I am now, co-founder and Lead UX Designer at OSRF. I mention this because, while UX researchers and designers are now in high demand at technology companies, that path would have been unknown to me without Leila’s example.
The message here is twofold: find a mentor within robotics, as I did with Leila; and realize there can be more to a STEM career than only engineering. There is enormous opportunity for women and researchers and designers; there are countless ways for women to kick ass in the robotics field. Don’t misunderstand me: be an engineer if that’s where your passion lies, but know that there’s more to robotics than engineering.
As robots become increasingly commonplace in our everyday lives, the need for robotics designers and researchers (and engineers) is growing, opening up vast opportunities to shape how robots function and behave, and how we in turn perceive and interact with them. Just one simple example: What should happen during a robot-human encounter in a narrow hallway? Numerous social norms govern this scenario on how to negotiate passage when only humans are involved. Bringing such an encounter to a satisfactory and natural conclusion when a robot is involved requires thoroughly technical as well as social and user experience expertise. Who knows, maybe having a female perspective in this research means that robots will never be guilty of manslamming.
For robots to weave seamlessly into daily life, we must design and construct them with a keen understanding of the preference differences not just between genders, but within male and female populations as well. Robots need to appear non-threatening yet capable, be able to accommodate personal space preferences, and provide the desired amount of information with the communication style or tone most effective with its current audience. Robots designed and built exclusively by men, or exclusively by women, will fail in some regards to meet the needs of half their users. If we wish for robotic technologies to flourish, it would be foolhardy to accept the STEM fields’ gender ratio status quo.
Robotics is special among technical areas in that the breadth of required specialties is exceptionally broad. Without an understanding of technical, psychological, cognitive, and social factors robotics will stay locked in limited industrial application areas. Such a limitation would be a enormous opportunity lost.
![]() Our friends at Clearpath Robotics announced today that they’re offering ROS consulting services for enterprise R&D projects. And they’ve committed to giving part of the proceeds to OSRF, to support the continued development and support of ROS!
Our friends at Clearpath Robotics announced today that they’re offering ROS consulting services for enterprise R&D projects. And they’ve committed to giving part of the proceeds to OSRF, to support the continued development and support of ROS!
This service is something that we’ve heard requested many times, especially from our industry users, and we’re excited that Clearpath is going to offer it. If you’re looking for help or advice in using ROS on a current or upcoming project, get in touch with Clearpath.
![]() As part of the run-up to the DARPA Robotics Challenge Finals in June, check out this piece on the role of tools like Gazebo: “The Value of Open Source Simulation for Robotics Development and Testing.”
As part of the run-up to the DARPA Robotics Challenge Finals in June, check out this piece on the role of tools like Gazebo: “The Value of Open Source Simulation for Robotics Development and Testing.”
Stay tuned for previews of what we’ll be showing off at the DRC Finals Expo…
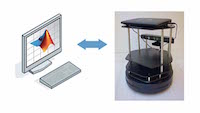 We reported last year that our friends at MathWorks had released ROS support for MATLAB. They presented that work in a talk at ROSCon 2014.
We reported last year that our friends at MathWorks had released ROS support for MATLAB. They presented that work in a talk at ROSCon 2014.
That ROS support has now been promoted into an official MATLAB toolbox, called the Robotics System Toolbox. You can work in MATLAB with any ROS-enabled robot, simulator, or log data. Check out their overview video!
Accepted students will participate in real-world software development,
contributing to robotics projects like Gazebo, ROS, and Ignition
Transport, and engaging with the global robotics community, all while
getting paid. As a bonus, this year we also offer ROS-Industrial
projects.
Check out our GSoC site and don’t forget to visit our ideas page, which lists projects that we’re interested in. Feel free to ask
questions and propose suggestions at gsoc@localhost. The
student application period starts March 16th. Get ready for a robotics
coding summer!
![]() We’re pleased to announce that OSRF has joined the Dronecode Project, which promotes open source platforms for Unmanned Aerial Vehicles (UAVs). That mission, plus the burgeoning use of ROS and Gazebo in UAV development, make Dronecode and OSRF natural partners.
We’re pleased to announce that OSRF has joined the Dronecode Project, which promotes open source platforms for Unmanned Aerial Vehicles (UAVs). That mission, plus the burgeoning use of ROS and Gazebo in UAV development, make Dronecode and OSRF natural partners.
We’ll work with Dronecode to make our tools even more useful for UAV projects. We’ll also bring together the general robotics community and the aerial robotics community. Both groups have valuable tools and capabilities which can be shared, to everyone’s benefit.
We look forward to getting more involved with the UAV community and seeing some amazing open source flying robots.
At the end of January, Baxter left OSRF for a stint in Corvallis, Oregon where he will be used in a project that is investigating the use of teleoperated robots in the treatment of highly contagious diseases such as Ebola. He will be joining the Personal Robotics Group, part of Oregon State University’s growing Robotics Program, as part of their NSF-funded work to bring robots to the front lines of the current Ebola outbreak.
Health care workers are at the highest risk of exposure when working in close proximity to infected patients. Even the use of personal protective equipment still exposes workers to considerable risk of infection. These risks are due to both faulty practice and extreme conditions, especially in harsh locations such as West Africa where high temperatures and humidity present real operational challenges. The use of intuitive teleoperation interfaces will enable health care workers to remotely operate robots (such as Baxter) to perform significant portions of their jobs from a safe distance. Examples of potential tasks include patient monitoring, equipment moving, and contaminated material disposal. This will allow health care workers to provide needed care while maintaining the important patient-health care worker interaction, all while making their jobs safer and more tolerable.
Here is an example of a task that Baxter will help investigate, as performed by the PR2:
The Gazebo team has been hard at work setting up a simulation environment for the Defense Advanced Research Projects Agency (DARPA)’s Hand Proprioception and Touch Interfaces (HAPTIX) program. The goal of the HAPTIX program is to provide amputees with prosthetic limb systems that feel and function like natural limbs, and to develop next-generation sensorimotor interfaces to drive and receive rich sensory content from these limbs. Managed by Dr. Doug Weber, HAPTIX is being run out of DARPA’s Biological Technologies Office (BTO).
As the organization maintaining Gazebo, OSRF has been tasked with extending Gazebo to simulate prosthetic hands and test environments, and develop both graphical and programming interfaces to the hands. OSRF is officially releasing a new version of Gazebo for use by HAPTIX participants. Highlights of the new release include support for OptiTrack motion capture system; the NVIDIA 3D vision system; numerous teleoperation options including the Razer Hydra, SpaceNavigator, mouse, mixer board and keyboard; a high-dexterity prosthetic arm; and programmatic control of the simulated arm using Linux, Windows and MATLAB. More information and tutorials are available at the Gazebo website. Here’s an overview video:
“Our track record of success in simulation as part of the DARPA Robotics Challenge makes OSRF a natural partner for the HAPTIX program,” according to John Hsu, Chief Scientist at Open Source Robotics Foundation. “Simulation of prosthetic hands and the accompanying GUI will significantly enhance the HAPTIX program’s ability to help restore more natural functionality to wounded service members.”
Gazebo is an open source simulator that makes it possible to rapidly test algorithms, design robots, and perform regression testing using realistic scenarios. Gazebo provides users with a robust physics engine, high-quality graphics, and convenient programmatic and graphical interfaces. Gazebo was the simulation environment for the VRC, the Virtual Robotics Challenge stage of the DARPA Robotics Challenge.
This project also marks the first time Windows and MATLAB users can interact with Gazebo, thanks to our new cross-platform transport library. The scope is limited to the HAPTIX project, however plans are in motion to bring the entire Gazebo package to Windows.
Teams participating on HAPTIX will have access to a customized version of Gazebo that the Johns Hopkins University Applied Physics Laboratory Modular Prosthetic Limb (MPL) developed under the DARPA Revolutionizing Prosthetics program, as well as representative physical therapy objects used in clinical research environments.
More details on HAPTIX can be found in the DARPA announcement.
 OSRF is pleased to welcome Ying Lu! Ying is currently a Ph.D. student at the Robotics Lab of the Department of Computer Science at Rensselaer Polytechnic Institute, under the direction of Prof. Jeff Trinkle. Before that, she received a BS degree from University of Science and Technology of China. Her research focuses on contact and constraint models and solvers in multibody dynamics, with an emphasis on a benchmarking framework for unified interfaces to use different models and solvers. She was a member of the RPI Rockie team at the 2014 Sample Return Challenge, helping with the vision system, using ROS and OpenCV. Ying attended the 2013 and 2014 Grace Hopper Conference, a celebration for women in computing, and she was a 2014 Grace Hopper Scholar.
OSRF is pleased to welcome Ying Lu! Ying is currently a Ph.D. student at the Robotics Lab of the Department of Computer Science at Rensselaer Polytechnic Institute, under the direction of Prof. Jeff Trinkle. Before that, she received a BS degree from University of Science and Technology of China. Her research focuses on contact and constraint models and solvers in multibody dynamics, with an emphasis on a benchmarking framework for unified interfaces to use different models and solvers. She was a member of the RPI Rockie team at the 2014 Sample Return Challenge, helping with the vision system, using ROS and OpenCV. Ying attended the 2013 and 2014 Grace Hopper Conference, a celebration for women in computing, and she was a 2014 Grace Hopper Scholar.
Ying is enthusiastic and excited to see how robotics is going to change the world, just as the computer revolution does!
 OSRF is pleased to welcome Louise Poubel! Louise grew up in Brazil and thought why not cross the world and go to college in Japan? As if two continents weren’t enough, later she decided to get a master’s in robotics in Europe, where she studied in Poland and France. There, she did research on making humanoid robots imitate human whole body movements in real time. At the end of 2013, Louise joined OSRF as an intern, and has since been collaborating with GUI tools for Gazebo. Now she’s coming to conquer one more continent while joining our team full-time.
OSRF is pleased to welcome Louise Poubel! Louise grew up in Brazil and thought why not cross the world and go to college in Japan? As if two continents weren’t enough, later she decided to get a master’s in robotics in Europe, where she studied in Poland and France. There, she did research on making humanoid robots imitate human whole body movements in real time. At the end of 2013, Louise joined OSRF as an intern, and has since been collaborating with GUI tools for Gazebo. Now she’s coming to conquer one more continent while joining our team full-time.
She is excited about open source technology and user experience because she believes that machines are here to make life easier for everyone around the world, not the opposite! Along this line of thought, she hopes one day to make robotic Rubik’s cubes which solve themselves while humans just sit back and relax.
We are happy to introduce a prototype for ROS 2 in deeply-embedded systems, using the stm3240g-eval board, which contains an STM32F4 microcontroller, an Ethernet interface, and some extra SRAM. The prototype combines a real-time operating system (NuttX) with a pseudo-POSIX interface, a DDS implementation (Tinq), and an example that uses ROS message types to communicate with other ROS 2 machines.
Here’s Victor to tell you about it:
This prototype has several caveats, most importantly that system performance is limited to ~3 Hz at the moment due to the UDP implementation of the underlying RTOS, but we expect that to improve drastically over time. We are hoping that this work is a starting point for the next generation of ROS-compatible sensors and actuators: robot parts that, out of the box, plug into an Ethernet network and interoperate in the ROS environment as first class participants.
 Toward the end of last year, we asked you for financial support. And you responded. We received donations ranging from $2 to $100, coming from individuals spanning 26 countries. It’s fantastic to see this breadth of support. Thank you to everybody who donated!
Toward the end of last year, we asked you for financial support. And you responded. We received donations ranging from $2 to $100, coming from individuals spanning 26 countries. It’s fantastic to see this breadth of support. Thank you to everybody who donated!
You can continue to donate to OSRF at any time, and of course we’re always interested to talk with new corporate or government sponsors.
Another way to support OSRF, if you’re an Amazon customer, is to login to Amazon Smile and select us (Open Source Robotics Foundation) as your charity (learn more).
 Ubuntu announced today that their new Snappy Core operating system, already being adopted for cloud computing, will be specifically supported on embedded, connected, mobile devices (aka Internet of Things).
Ubuntu announced today that their new Snappy Core operating system, already being adopted for cloud computing, will be specifically supported on embedded, connected, mobile devices (aka Internet of Things).
And what’s the coolest kind of embedded, connected, mobile device? A robot, of course. Here at OSRF, we’ve been working with Ubuntu to ensure that ROS will be ready to use on Snappy and we’re making plans for a ROS / Snappy store. You’ll be able to write, share, and run ROS-based Snappy apps for your favorite robots (check out an early prototype).
 We’ve supported and relied on Ubuntu Linux since the beginning of the ROS project, and we’re excited to be part of this transition to a new Ubuntu-based app ecosystem.
We’ve supported and relied on Ubuntu Linux since the beginning of the ROS project, and we’re excited to be part of this transition to a new Ubuntu-based app ecosystem.

We’re happy to announce that OSRF will be an advisor to the Eyes of Things (EoT) project, which was recently selected by the European Commission in one of the first batches of the ICT-H2020 Framework Programme. The EoT project brings together eight European partners: VISILAB (Spain, Project Coordinator), Movidius (Ireland), Awaiba (Portugal), DFKI (Germany), Thales (France), Fluxguide (Austria), nViso (Switzerland) and Evercam (Ireland).
The 3.7M€ project envisages a computer vision platform that can be used both standalone and embedded into more complex systems, particularly for wearable applications, robotics, home products, and surveillance. The core hardware will be based on a system-on-chip (SoC) that has been designed for maximum performance of the always-demanding vision applications while keeping the lowest energy consumption. This will allow always on and truly mobile vision processing. Software will be developed in parallel to this design, at both the low and middleware levels, and also for a number of demonstrators. The demonstrators span applications in surveillance, wearable configuration and embedded into a household item. Eyes of Things will have a duration of three years, starting in January 2015. The kick-off meeting will be January 27th, 2015.
 OSRF is pleased to welcome Esteve Fernandez! After working for many years on distributed systems, Esteve switched gears and pursued a career in robotics. He also enjoys writing software and sharing it with others, so combining open source and robotics is an exciting opportunity for him.
OSRF is pleased to welcome Esteve Fernandez! After working for many years on distributed systems, Esteve switched gears and pursued a career in robotics. He also enjoys writing software and sharing it with others, so combining open source and robotics is an exciting opportunity for him.
Esteve holds a MSc in Artificial Intelligence and Robotics and M.S.E. and B.S.E. in Computer Engineering, and has been a professional developer for over 10 years. He is a member of the Apache Software Foundation and a frequent speaker at open source conferences, such as PyCon US and EuroPython.
Overall, Esteve found in robotics the perfect excuse for playing with Lego in his 30s without getting weird looks.
When we started the ROS project back in 2007, our goal was to build an open robotics software platform for students, engineers, entrepreneurs, and anyone else to freely use and modify. In 2012, we took the next step by founding OSRF as an independent non-profit organization to pursue that mission, with responsibility for both ROS and Gazebo. Today, we see these tools used worldwide to teach concepts, solve problems, and build products in ways that we couldn’t have imagined at the beginning.
We couldn’t be happier with the size and breadth of the collaborative community that we’ve built together, and we’re grateful to everyone in the community for the roles that you’ve played.
You won’t be surprised to hear that it costs money to run OSRF. We employ a small team of amazing individuals, we operate an office in the Bay Area, and we run a suite of online services on which the community depends.
Since our founding, OSRF has enjoyed generous financial support from government agencies and private industry, for which we’re very grateful. We hope and anticipate that that support will continue in the future. But now, as we approach the end of OSRF’s third year, we’re trying something new: asking you, our users, for support.
If you rely on ROS and/or Gazebo in your lab, your startup company, your weekend projects, or elsewhere, please consider donating to OSRF. Your donation will support our people and infrastructure so that we can spend (even) more time developing and maintaining the software and services on which you depend.
As one example, if everyone who visits the ROS wiki between now and the end of the year donates just $2, we’ll have our costs covered for next year to manage, update, and host all of our online services, including the wiki. Donations in any amount are welcome. Give more, and we can do more.
Thank you for your support.
Contributions to the Open Source Robotics Foundation, a 501(c)(3) non-profit organization, will be used at its discretion for its charitable purposes. Such donations are tax-deductible in the U.S. to the extent permitted by law.
We’re pleased to announce the public release of information on a long-standing collaboration between OSRF and Sandia National Labs. The Intelligent Systems Control Department at Sandia is developing a humanoid robot intended for energy-efficient walking. We’re participating in the project by developing an electrical system capable of driving its numerous large motors and interfacing with higher-level software systems. Naturally, our contributions will be released as open-source hardware and firmware. Today’s press release from Sandia provides more details, and includes this introductory video:
(You might recall that we also recently built the open electronics and firmware for a new robot hand.)
OSRF is pleased to welcome Rachel Hwang, our intern for the Outreach Program for Women!
Rachel got her B.S. in Computer Science from the University of Chicago. As an undergrad, she worked as a research assistant at the Chicago Language Modeling Lab. With a background in linguistics, Rachel is especially interested in machine learning, natural language processing and all things computational linguistics. As on OPW intern, she will be working on a path planning algorithm for Gazebo. You can follow Rachel’s progress on her blog.
Welcome!

Look at all these enthusiastic robot nerds! Even Baxter got dressed up. Happy Halloween from everyone at the Open Source Robotics Foundation!
A couple of weeks ago, we said goodbye to our old office, the original home of OSRF. Now that we’re totally unpacked, we can say hello to our new office. It’s a old warehouse building that we had renovated into a great R&D space:

If you’re coming to visit, note the new location.
Tashwin Khurana, M.S. student in Computer Science from Lehigh University, worked with OSRF during her internship as part of the Gnome Outreach Program for Women.
Tashwin developed a tool for downloading data from the OpenStreetMap database to produce a corresponding world file for Gazebo. Tashwin focused on importing roads, traffic signals, and buildings.
In addition, she provided support for a new shape type: the extruded polyline. The two-dimensional shape is defined with a series of points that can be extruded to form a solid object. This can be very useful for visualizing buildings and similar constructions.
References:
www.gazebosim.org
Repositories:
https://bitbucket.org/osrf/gazebo
https://bitbucket.org/tkhurana/gazebo
https://bitbucket.org/tkhurana/sdformat
Since July 2012, OSRF has lived happily in Mountain View in our office on Shoreline Boulevard. In the intervening 2+ years, the team has expanded and now we’ve outgrown that building. Today is our first day in our new office, which is twice the size of the old one and a bit more professionally appointed. We’re still in Mountain View, now on South Whisman Rd
Last week, we said goodbye to the old office by raising a glass, lowering a flag, and reminiscing about the last couple of years. (We’ll post pictures of the new place after we’ve finished unpacking.)



We’re happy to announce that videos and speakers’ slides from ROSCon 2014 have been posted, and are linked from the program page.
The videos can also be browsed here
Enjoy!

 OSRF is pleased to welcome Jackie Kay as a software engineer! Jackie has dreamed of open source robots taking over the world since 2011, when she assisted Prof. Matt Zucker with developing the curriculum for a ROS-based robotics course at Swarthmore College. She has also completed research at the Carnegie Mellon Robotics Institute in autonomous path planning for lunar rovers, mentored by Kevin Peterson at Astrobotic. She graduated Swarthmore in May and spent the summer as an intern at OSRF developing demos and tools for the Baxter Research Robot donated to us by Rethink Robotics. (You can view her work on GitHub.) She is excited to upgrade from intern to fully-fledged software engineer, and hopes this means the company will finally approve her plans for a fully automated beer delivery system using Baxter and a fleet of Turtlebots.
OSRF is pleased to welcome Jackie Kay as a software engineer! Jackie has dreamed of open source robots taking over the world since 2011, when she assisted Prof. Matt Zucker with developing the curriculum for a ROS-based robotics course at Swarthmore College. She has also completed research at the Carnegie Mellon Robotics Institute in autonomous path planning for lunar rovers, mentored by Kevin Peterson at Astrobotic. She graduated Swarthmore in May and spent the summer as an intern at OSRF developing demos and tools for the Baxter Research Robot donated to us by Rethink Robotics. (You can view her work on GitHub.) She is excited to upgrade from intern to fully-fledged software engineer, and hopes this means the company will finally approve her plans for a fully automated beer delivery system using Baxter and a fleet of Turtlebots.
Thanks to everyone for another fantastic ROSCon! It was a fun event, filled with great presentations and discussions, plus many of those, “we’ve Internet-known each other for years, but are now meeting for the first time,” moments. We’ll post the videos and slides as soon as we can, linking them from the program page.
Here’s the group at the end of the event (thanks to Chad Rockey for being our photographer):
And here’s one way to break down the demographics of the attendees, based on their type of affiliation: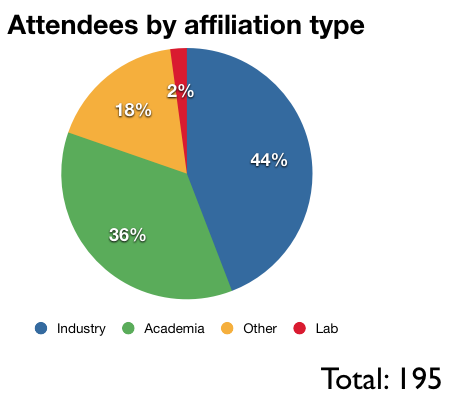
We’d like to thank our generous sponsors, especially: Qualcomm, Clearpath Robotics, Rethink Robotics, and Cruise Automation.
Our friends at RightHand Robotics recently posted more information on how they worked with OSRF and ROS to develop their new ReFlex Hand. We’d like to highlight the fact that OSRF’s contribution to the project, which included the controller board electronics, its firmware, and the low-level host-side driver software, is all available under an open source license, in the reflex-ros-pkg repository.
Thanks to Morgan and Gabby for their great work on the project!
To learn more, dive into the code, take a look at the video below, or check out their blog post.
Roboticists Now Able to Incorporate System-On-A-Chip Capabilities in Robot Designs and Applications
September 12, 2014 — MOUNTAIN VIEW, CA — Open Source Robotics Foundation (OSRF) today announced plans to extend the capabilities of ROS to Qualcomm ® Snapdragon™ 600 processors, a product of Qualcomm Technologies, Inc. (QTI), a wholly-owned subsidiary of Qualcomm Incorporated. Today’s announcement is made in conjunction with ROSCon 2014, the annual ROS Developer Conference. ROSCon runs from Sept. 12-13 in Chicago, IL. More information on the event is at http://roscon.ros.org/2014/
Via this agreement, OSRF will create and subsequently support a ROS release for Qualcomm Snapdragon 600 processors for both the Linux and Android operating systems. OSRF will test, refine, and fully integrate support for the ARM instruction set architecture into ROS development efforts. Once complete, OSRF will perform ongoing maintenance to generally support ROS on Qualcomm Snapdragon 600 processors.
The benefit to the worldwide robotics community working on the lower-power ARM chips means that robots can be smaller, more efficient, and have a longer battery life.
“As adoption of ROS continues to increase, our developer community wants to incorporate the latest computing platforms,” says Brian Gerkey, CEO of OSRF. “Given the intersection between robotics and mobile and embedded systems, we believe that offering Snapdragon’s SoC capabilities to our users will be a big hit.”
“Qualcomm Technologies is proud to join OSRF and the ROS community to create an official, supported release for Qualcomm Snapdragon 600 processors,” said Matt Grob, executive vice president and CTO, Qualcomm. “We’re excited about the potential for future innovation and invention in the robotics community with the combination of ROS and Qualcomm Snapdragon processors.”
ROS (for “Robot Operating System”) is a collection of tools and libraries that simplify the task of creating and programming robotic platforms and applications. ROS is overseen by OSRF, who make the OS freely available to any and all users via open source licenses. Since its introduction in 2007, ROS has grown to become the de facto OS for roboticists all over the world.
Availability
ROS for Qualcomm Snapdragon 600 processors will be available on the Linux OS and is anticipated to be available in Q4 2014 and on the Android OS in the first half of 2015. For more information on Qualcomm Snapdragon processors, please visit, https://www.qualcomm.com/#/products/snapdragon
About The Open Source Robotics Foundation
The Open Source Robotics Foundation (OSRF) is an independent non-profit organization founded by members of the global robotics community. The mission of OSRF is to support the development, distribution, and adoption of open source software for use in robotics research, education, and product development. More information on OSRF is available at www.osrfoundation.org or by following the company on Twitter @OSRFoundation
Media Contacts:
Tim Smith
Element Public Relations
tsmith@elementpr.com
415-350-3019
Qualcomm and Snapdragon are trademarks of Qualcomm Incorporated, registered in the United States and other countries. All Qualcomm Incorporated trademarks are used with permission.
We have an update from NASA’s Johnson Space Center (JSC): ROS is now up and running on Robonaut 2 (R2) aboard the International Space Station (ISS).

ROS was delivered to ISS aboard a SpaceX rocket as part of a recent resupply mission that also included a set of robotic legs that will be attached to R2 soon.
NASA was able to upgrade the R2 torso earlier this month after on-orbit surgery to remove old processors and electronics and install new ones. On August 12, R2 powered up using ROS for the first time.
As we mentioned in a prior post, the R2 team at JSC has been using ROS for R2 development on Earth for the last couple of years. They combine ROS with OROCOS RTT to produce a flexible development environment with real-time capabilities.
Allison Thackston and Julia Badger from the R2 team will be addressing the audience at ROSCon on the unique challenges of deploying software in space systems. Their presentation, “ROS in Space,” will open the second day of the conference. ROSCon takes place on September 12 and 13 in Chicago, IL. For more information and registration details, visit the ROSCon website.

This is a common scenario at Blue River Technology because the company is in the agriculture business. Blue River combines computer vision and robotics to deliver precision thinning to lettuce growers.

Blue River has been using ROS since late 2012. According to Willy Pell, Blue River’s Sr. Systems Engineer: “We love ROS because it makes it easy to find and correct errors in the worst possible circumstances. Any time something is wrong we know within a few dozen lines of code where the problem is presenting itself. It allows us to build systems The UNIX Way. In other words, we make simple, open source programs that communicate well with other programs.”
Blue River makes machines called lettuce thinners. Lettuce growers plant too many seeds because only 80% of seeds actually turn into plants. Since a lettuce head needs 10 inches on either side to get the resources it needs, growers must then thin the field of excess lettuce. Blue River’s machine is pulled behind a tractor and takes pictures of the plant seedlings. It identifies the ones to keep and the ones to kill and toggles a sprayer to render its verdict. There is finality to this machine. If it messes up it doesn’t just waste time, it impacts the grower’s yield.
Added Pell, “ROS has been a fantastic tool for us. I love how you can gut one node and not have it affect the rest of the system. I love how you can break the system apart and test subcomponents. Being able to confidently refactor, test and debug large parts of the system allows us to evolve extremely quickly.”

It never ceases to amaze and delight us when we learn of new and innovative uses of ROS. Just recently, ROS celebrated a celestial milestone when it arrived at the International Space Station as part of Robonaut 2. While Blue River’s solution is certainly more terrestrial it is no less innovative and impactful. Being able to deliver a precision agricultural solution to farmers means higher yield and fewer chemicals.
Because of the permissive open source license of ROS, we aren’t always aware of who is using ROS and for what purposes. In this case, we are very grateful to the team at Blue River for sharing their story with us.
If you are using ROS and have a story to share, please drop us a line at info@localhost.

This week at ICRA in Hong Kong, RightHand Robotics is announcing their new ReFlex hand. Built on over a decade of research in the Harvard Biorobotics Lab and the Yale Grab Lab, it leverages the best insights the team gained from the DARPA Autonomous Robotic Manipulation (ARM) program. The hand provides three mechanically intelligent underactuated fingers, highly sensitive tactile feedback, a solid electrical interface designed by OSRF, and (naturally) a ROS API!
If you’re at ICRA, find the RightHand team to see a live demo. Otherwise, here’s a video:
We learned recently from the folks at Avidbots that they’re developing ROS-based commercial cleaning robots. Here’s their story:
Billions of square feet of commercial floor space are cleaned nightly in the US. Avidbots automates the most time-intensive tasks of retail and storehouse cleaning: sweeping and scrubbing of floors. Powered by ROS, these robots automatically clean floors in grocery stores, airports, and malls, enabling cleaning staff to concentrate on higher value tasks such as window cleaning, dusting, and polishing. The end result? Staff who are better-paid and more productive — a clean win for everyone.
While developing these robots, Avidbots must iterate rapidly through designs. Two key facilitators of this fast development cycle are ROS and Gazebo. ROS’s communication system promotes a simple modular design, while Gazebo provides for accurate simulation testing. Modular software design and thorough simulation testing enable Avidbots to achieve its rapid development goals. This strategic use of ROS and Gazebo is significantly accelerating Avidbots’ entry into the robotic services space.

Our own Brian Gerkey is speaking today at Solid 2014 in San Francisco. In his talk, Brian will introduce the DARPA Robotics Challenge (DRC), present in detail the cloud-hosted Virtual Robotics Challenge component of the DRC, and discuss opportunities for the resulting open source simulation software to be an ongoing platform for robotics research, education, design, and product development.
Gzweb Mobile from OSRF on Vimeo.
During her Gnome Outreach Program for Women internship with OSRF, Louise Poubel made Gzweb work on mobile platforms by designing a mobile-friendly interface and implementing lighter graphics. Until recently, Gazebo was only accessible on the desktop. Gzweb, Gazebo’s web client, allows visualization of simulations in a web browser.
Louise implemented the graphics using WebGL. The interface includes menus suitable for mobile devices and multi-touch interactions to navigate the 3D scene. Louise conducted usability tests throughout the development phase in order to improve user experience and quickly discover and resolve bugs.
To optimize 3D rendering performance on mobile platforms, she also implemented a mesh simplifcation tool which allows users to choose how much to simplify 3D models in the database during the deployment stage and generate coarse versions of meshes to be used by gzweb.
Mobile devices have been, and will continue to be, a big part of our lives. With Gzweb Mobile, users can visualize simulations on mobile phones and tablets and interact with the scene, inserting shapes and moving models around.
References:
http://www.gazebosim.org
Gzweb wiki
Repositories:
Gzweb Bitbucket repository

Our own Nate Koenig is at the FIRST regional competition today and tomorrow in St. Louis. The kids are enjoying trying out the Gazebo simulation of the FIRST competition arena, which includes a forklift-equipped robot and some objects to interact with:


This simulation environment is being beta-tested with a few teams now. We hope that Gazebo will be available to all FIRST teams next year.
And of course our immersive virtual reality demo that combines Gazebo with the Oculus Rift headset and the Razer Hydra controller remains a hit:


CloudSim-Ed from OSRF on Vimeo.
During her Gnome Outreach Program for Women internship with OSRF, Ana Marian Pedro worked on CloudSim-Ed a prototype for a massive open online robotics course built with Google CourseBuilder. The course offers simulation tasks and challenges created with CloudSim, Gazebo and ROS.
To enroll in a course, a student must have a Google account and basic CloudSim credentials. CloudSim simulators are controlled from a custom module in CourseBuilder to launch simulation challenges and retrieve the score. When a challenge is launched, the Gazebo simulation world is viewed through a web interface, while an IPython notebook provides the means to interact with the simulated robot using ROS commands.
This project intends to provide students with a means to learn robotics using open source software. For schools with limited robotics laboratory space and equipment, the simulated worlds and environments give students a chance to experiment with minimal setup time and effort. This will hopefully reduce the time used in software troubleshooting when dealing with actual robot hardware.
References:
http://www.ros.org
http://www.gazebosim.org
http://cloudsim.io
https://code.google.com/p/course-builder/
Repositories:
https://bitbucket.org/ammpedro/cloudsim-ed-actuation
https://bitbucket.org/ammpedro/cloudsim-ed-web
https://sunlit-vortex-449.appspot.com/course
All of us at OSRF would like to wish everyone a happy National Robotics Week! There are events celebrating all things robotic all week long throughout the U.S. A full list of events can be found here. The folks at RoboWeek 2014 have even created some cool robot trading cards. Come and get ’em here. At least two of them are running ROS!
Closer to home, OSRF will be taking part in the Silicon Valley Robot Block Party. We will be among the many cool robotics companies showing off their wares. The event is this Wednesday, April 9, from 1:00 to 4:00 pm at WilmerHale in Palo Alto. Robot Block Party is a free event open to the public, so go ahead and spread the word.
And for those of you who can’t make it Wednesday, or simply can’t get enough of OSRF and ROS, please look for us on Thursday at Xconomy’s Robo Madness 2014. Hosted by Xconomy’s Wade Roush, Robo Madness takes place at SRI International from 1:00 to 5:40 pm so get yourself signed up right away. Our own Brian Gerkey will be on stage at 1:25 discussing ROS, and then again at 5:20 on a wrap-up panel discussion moderated by John Markoff of The New York Times.
As reported at HERE Three Sixty, their global fleet of hundreds of mapping cars is running ROS!

They carry laser range-finders, cameras, and GPS that are used to estimate the vehicle’s posisiton and gather 3-D pictures of the surrounding environment. That data gets shipped back to their headquarters for processing.
As HERE’s Michael Prados put it, “The system of sensors and computers means the software that’s needed is very like that which is used to create robots.” So they decided to build their cars’ software on ROS. The software runs on a headless server in the car’s interior, with the driver interacting via a mobile application on a tablet that he or she can operate easily from the seat.

“We chose the open source ROS because it was the best solution, hands-down,” Michael concludes. “And now we’re looking into the ways that we might give back to OSRF, and help its future success.”
Read the whole story at HERE Three Sixty.
Update (March 13): The launch has been delayed to the end of March.
Albert II is famous for being the first monkey in space, in June 1949. Laika is equally renowned for being the first animal to orbit the Earth, in 1957. On Sunday, March 16th, at 4:41am (unless inclement weather intervenes), ROS will celebrate its own celestial milestone when it is launched into space aboard a SpaceX rocket as part of a resupply mission to the International Space Station (ISS).


In conjunction with NASA’s Robot Rocket Rally March 14-16 at the Kennedy Space Center in Florida, SpaceX’s third mission will include a set of robotic legs for the Robonaut 2 (R2) humanoid torso that is currently aboard the ISS. Once those legs are attached to R2, ROS will officially be running in space.
For the last few years, the NASA/GM team at the Johnson Space Center has been using ROS for R2 development here on Earth. We first heard about that at ROSCon 2012 in Stephen Hart’s keynote presentation, where he described how they combine ROS and OROCOS RTT to achieve flexible, real-time control of R2. Following the launch this weekend, that open source software will be running on the R2 that’s on ISS.


The R2 team also uses the open source Gazebo simulator to simulate R2 when they’re doing development and testing. They’ve released their models of R2 and ISS as open source for the community to work with. We recently integrated those models into an immersive teleoperation Gazebo demonstration that we’ll be running at the Robot Rocket Rally this weekend. Drop by our booth and find out what it’s like to “be” Robonaut 2!
ROS has already powered robots in the air, on the ground, on and under the water, and on every continent, but we at OSRF couldn’t be more excited about ROS journeying to outer space.

The summer is well known for school holidays, baths in paradisiacal beaches, mojitos, … but nothing comparable to a Summer of Code! OSRF is participating in the 10th Anniversary of Google Summer of Code.
Do you want to spend your summer doing real-world software development, contributing to robotics projects like Gazebo, ROS, and CloudSim, and engaging with the global robotics community, all while getting paid? Then check out our GSoC 2014 site. You’ll also want to read through our ideas page, which lists projects that we’re interested in. Feel free to ask questions and propose suggestions at gsoc@localhost. The student application period starts March 10th. Get ready for a robotics coding summer!.
Next week, OSRF will be at the Robot Rocket Rally at the Kennedy Space Center (KSC) in Cape Canaveral! Stop by our booth between Friday, March 14 and Sunday, March 16th to try out one (or both!) of our Oculus Rift demos. Teleoperate a simulated version of NASA’s Robonaut-2 in the International Space Station, or try your hand at clearing rubble with the Atlas robot. You may have seen the Atlas robot compete in the recent DARPA Robotics Challenge Trials in Homestead, Florida.
The Robot Rocket Rally celebrates “the latest in robotic technology from NASA, industry leaders and universities.” The event coincides with the SpaceX launch that is delivering robotic legs to the Robonaut-2 aboard the ISS, along with life-sustaining supplies for those humans aboard.
Stop by our booth to play with the demos, have a chat, or pick up some stickers. Look for us in the big tent in the Rocket Garden!

Cross posted from ROS Blog
We’re pleased to announce that we will be hosting ROS Kong 2014, an international ROS users group meeting, in Hong Kong on June 6th, immediately following ICRA. This one-day event will complement ROSCon 2014, which will happen later in the year (see below).
ROS Kong 2014 will feature invited speakers, lightning talks, and Birds-of-a-Feather sessions. There will be plenty of time to meet other ROS users both from Asia and around the world.
If you are interested in attending, please save the date: Friday June 6th, 2014. We will be setting up registration and distributing more information in the coming month. We have a large auditorium but registration will be limited.
If you have any questions or are interested in sponsoring the event please contact us at roskong-2014-oc@localhost.
In related news, we are tentatively planning to hold ROSCon 2014 in Chicago in September, in conjunction with IROS. Stay tuned for more on that event.
Project Tango was just announced by Google’s ATAP group (http://www.google.com/atap/projecttango/). The project developed 3D localization and mapping capable of running in real-time on a phone. We expect the technology developed as part of Project Tango to be transformative for the robotics industry and are proud to have been a part of the process.
OSRF has been a partner with ATAP on the Tango project since May 2013. Our role was to bring our open source ROS (http://www.ros.org) software and expertise to bear on the problems that Tango is tackling. While Tango isn’t strictly a robotics project, there is a lot of similarity between their needs and what we have encountered over the years working with robots.
Among our contributions were developer tools for debugging, data logging, and data visualization. Project Tango used popular ROS tools, including rviz and rosbag, for development and debugging on a second screen, such as a desktop or laptop, both for live and recorded data.
Somewhat surprisingly, we also helped out with managing the complex code base that became Tango. With a large team of geographically distributed developers working at a furious pace, it’s not easy to keep track of the software in a project like this. Fortunately, we’re intimately familiar with this challenge from the past six years of ROS development. Project Tango was able to leverage the catkin build system developed for the ROS ecosystem to bring together the work from their many contributors.
In addition to integrating new code, catkin was used to integrate many existing libraries including familiar ROS dependencies such as OctoMap, OpenCV, and Eigen. To support both on-device and desktop debugging, catkin was used to enable compiling for Android devices as well as desktop targets from the same source tree.
Our work on Project Tango resulted in new features, bug fixes, and polish being added to many of our core tools, all of which have been made available to our community.
Having recovered from our exhilirating (and exhausting) trip to the DARPA Robotics Challenge (DRC) Trials in Florida, we’ve been mulling over the results of the Trials and looking back on the simulation-based Virtual Robotics Challenge (VRC) that we held in the summer.
As you’ll recall, the goals of the VRC were two-fold. First, we wanted to identify the teams from around the world who are the best at writing software for remote supervisory control of a humanoid robot in disaster response situations. After the VRC, the top seven teams were given access to an Atlas robot from Boston Dynamics, with which they then competed in the Trials. And because they only had a few months between receiving their robot
and heading to the Trials, the second goal of the VRC was to force teams to build and test their software in simulation so that they could be up and running with a working system as soon as they took delivery of the Atlas hardware.
Looking at the results, we’re feeling pretty good about the VRC. At the Trials, which saw sixteen teams compete, five of the top eight teams were previously top finishers in the VRC (the top eight from the Trials qualified for continued DARPA funding). And their relative performance at the Trials almost matched their relative performance in the VRC:
| Team | DRC Trials finish | VRC finish |
| IHMC Robotics | 2nd | 1st |
| MIT | 4th | 3rd |
| TRACLabs | 6th | 4th |
| WRECS | 6th | 2nd |
| TROOPER | 8th | 8th |
So a majority of the top teams at the Trials had first competed and won in simulation, and they were then able to transition their software from simulation to hardware in a very short period of time (they had also received a very capable Atlas robot, which surely contributed to their successes).
We’re proud of these results and we feel that they bode well for the use of simulation in future robotics projects, in competitions, and in education.
It’s also worth noting that team WRECS started out as an unfunded “Track C” team, yet placed 2nd in the VRC and 6th in the Trials, outperforming most of the fully funded teams along the way. Perhaps we’ll see more of this kind of non-traditional source selection in future programs.
Hugo, John, Morgan, Nate, and Steffi had a fantastic first day at the DRC Trials here in sunny, windy Florida. The demos are a huge hit with the crowd (especially all those kids who are here on field trips). Hundreds of people have tried their hands at controlling a Gazebo-simulated Atlas robot using the Oculus Rift and Razer Hydra. Here’s one happy participant:

There are so many awesome robots here; it’s a bigger production than you can probably imagine. Here’s Nate being interviewed live on the Jumbotron:

Check our Twitter feed for updates and more photos.
Oh, and the OSRF swag is going quickly, so if you’re at the event, stop by our booth soon!
OSRF is pleased to welcome Louise Penna Poubel, Tashwin Khurana, Binnur Görer and Ana Marian Pedro, our interns for the Outreach Program for Women!

Louise got her B.S. in Electromechanical engineering from Chiba University in 2011 and her double M.S. from the European Master in Advanced Robotics (EMARO) at Warsaw University of Technology and Ecole Centrale de Nantes in 2013. Her masters research focused on whole-body online imitation of human motion by humanoid robots, using the Nao robot and the Kinect sensor. At OSRF, she will be adapting the WebGL interface of Gazebo to work on mobile devices. In her free time, she enjoys 3D printing, puzzles, traveling and extreme sports.
Louise’s blog: http://myshumi.net/
Tashwin is pursuing a Master’s in Computer Science at Lehigh University. She has been working at the VADER lab (Vision, Assistive Devices, and Experimental Robotics Laboratory) with Prof. Dr. John Spletzer for over a year and loving every minute of it! Tashwin has been focusing on the Lehigh Mapping Trike project, which will be used as a means to construct large-scale, three-dimensional maps in outdoor pedestrian zones. As an OPW intern, Tashwin will be building an Open Street Maps (OSM) API plugin for the Gazebo Simulator.
Tashwin’s blog: http://khuranatashwin.wordpress.com
Binnur is a Ph.D. student at the Department of Computer Engineering, Boğaziçi University. She has recently completed her MSc. thesis which is titled “Developing a Fitness Coach Robot for Elderly People in Assisted Living Environments”. Binnur’s supervisor is H. Levent Akin. She is a member of the Robotics Research Group and the Cerberus RoboCup Standard Platform League Team. Binnur’s research focuses on social robotics. As an OPW intern, she aims to integrate an SDF editor into Gazebo. This contribution will allow users to make changes in the current model while the simulator is running.
Binnur’s blog: http://robot.cmpe.boun.edu.tr/~binnur/
Ana Pedro is an M.Sc. Computer Science Candidate and a member of the Center for Automation Research in De La Salle University, Manila. She is currently working on her thesis on mobile robot localization and is interested in developing robotic applications for children and education. Ana Pedro will be working on an educational challenge using CloudSim, ROS and Gazebo.
Ana Pedro’s blog: http://thelittlerobotblogs.wordpress.com
We’re excited to see the work that Louise, Tashwin, Binnur and Ana Pedro will be doing over the next few months. Check their blogs often to follow along with their experiences and contributions!
In just a few short days, OSRF will be flying out to the DARPA Robotics Challenge Trials in Homestead, Florida! The DRC Trials will take place at the Miami-Homestead Speedway on Friday, December 20, and Saturday, December 21. OSRF played a pivotal role in the DARPA Virtual Robotics Challenge back in June, and we’re very excited to attend the next stage of the competition and have the opportunity to watch real robots in action! A total of 17 teams qualified for the Trials, and their robots will be competing on 8 tasks including vehicle driving, ladder climbing, hose manipulation, and more.
While we’re itching to gawk at the awesome robots all day long, we’ll also be hanging out in the OSRF booth at the Expo. We’ll set up shop with a number of demos, videos, and of course lots of OSRF swag. Come on by and try to get the high score on our TurtleBot racing game, or check out the Sandia hand, which can be seen on some of the competing Atlas robots. You can also try your hand at clearing rubble with a Gazebo-simulated Atlas robot. You’ll be fully immersed in the robot’s world once you strap on the Oculus Rift and have a look around. You’re guaranteed to look like a winner in the process.
Stop by our booth to chat, play with our demos, pick up some free stuff, or just observe us awkwardly.

Join the Cool Kids Club by trying out our Atlas Rubble Clearing Demo!

Cruise around a simulated racetrack in our TurtleBot racing game.
Looking for that perfect Christmas present? Look no further. For a very reasonable amount you can buy that certain someone a ticket to hear OSRF CEO Brian Gerkey at The Commonwealth Club of California.
Brian, along with Rich Mahoney from SRI and Steve Henn from NPR, will be discussing “Robots in Unconventional Workplaces.”
Date: Wednesday, February 26, 2014
Time: 6:00 pm
Where: SF Commonwealth Club
595 Market Street, 2nd Floor
San Francisco, CA
(directions)
RSVP: Here
Given OSRF’s involvement in the DARPA Robotics Challenge, we know Brian will have lots to offer on the evening’s topic.
Cross-posted from the ROS blog.
When we started work on ROS, like most young open source projects, our greatest need was to recruit early adopters and fellow developers. So we targeted that audience: we built a wiki, filled it with documentation, tutorials, and code examples, and made the wiki the landing page at www.ros.org.
Well, times have changed. Now, six years into the project, we have a broader audience to consider. We want to reach teachers who are considering using ROS in their classrooms, managers who want to use ROS in a new product, journalists who are writing stories about ROS, and many, many others.
So, in celebration (just a bit late) of ROS’s sixth birthday, we’re pleased to present a new www.ros.org.


After all, a grown-up ROS deserves a grown-up website. Don’t worry: the wiki is still there, as are all the other ROS sites on which we depend.
Btw, like most things we do, the website itself is at GitHub. If you run into a problem or have an idea for improving the site, open an issue and we’ll have a look.

Happy Halloween from OSRF!
Including Jose, in Spain:


For any parents feeling guilty about all the candy their kids will be eating this week, there’s no better antidote than a healthy dose of educational fun. That’s exactly what’s in store this Saturday at the Bay Area Science Festival.
Some of us from OSRF will be bringing a few TurtleBot robots up to San Francisco to take part in the Robot Zoo. The Robot Zoo is a featured attraction at the Festival’s Discovery Days at AT&T Park this Saturday, Nov. 2, from 11:00 a.m. to 4:00 p.m.
Organized by Silicon Valley Robotics, the Robot Zoo is taking over Willie Mays Plaza and will feature fellow Willow Garage spin-offs Unbounded Robotics, who will be showing off their brand-new UBR-1 robot, and Suitable Technologies who will be showing off their Beam.
Details, logistics, and more information is here.

Open Source Robotics Foundation is a participating organization in the latest GNOME Outreach Program for Women.
In an effort to get more women involved in free and open-source software and robotics, OSRF is offering Outreach Program for Women internships from December 10, 2013 to March 10, 2014. The application deadline is November 11, 2013. Before the application deadline, applicants must get in touch with OSRF to discuss the individual projects they are interested in working on.
Participants will work remotely from home, while getting guidance from an assigned mentor and collaborating within their project’s team and the rest of the community. The projects include software development, web development, 3D modeling, user experience, and/or graphic design. Feel free to email us with additional proposals if you do not see one that fits perfectly. The stipend for the program is $5,000 (USD). Any woman who has not previously participated in the Outreach Program
for Women or Google Summer of Code is welcome to apply.
Check out the list of potential ideas for the program. Feel free to ask questions and propose suggestions at opw@localhost

Last week was an exciting one in the robotics community, as hundreds of people and dozens of robotics-related companies descended on RoboBusiness 2013 in Santa Clara, CA; just down the road from OSRF headquarters.
In all the enthusiasm and bot-gawking, we wanted to point out some exciting ROS-related news that might be have been overlooked. Rethink Robotics, the company behind Baxter, enhanced the open source capabilities of their research robot.
The Baxter Research Robot now:
Those of you who have followed OSRF’s contributions to the DARPA Robotics Challenge, in particular the Virtual Robotics Challenge are already familiar with the capabilities of Gazebo and MoveIt!, but it’s great to see another top-notch robotics company embrace and extend ROS.
We had the opportunity to host Dave Coleman this past summer and witness the rise of Baxter in both reality and simulation. Dave worked closely with Gazebo, ROS, and Rethink to simulate Baxter and develop its controllers. His hard work helped the Rethink team deliver Baxter SDK version 2.0, and added another simulated robot for the robotics community.

Last Friday, UC Berkeley hosted the first ever Stanford-Berkeley Robotics Symposium (SBRS ’13). A number of OSRF employees were in attendance, and Steven Peters presented on one of our latest projects combining the use of iPython Notebook with gzweb, a Gazebo WebGL client. His presentation included an inspiring video of a stack of simulated dumpsters falling on a Stonehenge-like arrangement of many giant dual-link robot arms, in front of a typical neighborhood gas station. You had to be there.
Steven was one of approximately 36 presenters, each of whom were allotted 10 minutes to speak. Talks ranged from academic to industry-focused, and covered a broad spectrum of robotics topics from mass-producing robots and robotics consulting, to computer vision and modeling human decision making. Following is just a small sampling of the many great talks from SBRS 2013.
Mark Palatucci of Anki spoke about Anki Drive (available soon in Apple retail locations), and the company’s goal of “combining the emotion of physical products with the magic of video games.” The Anki Drive project tackles a variety of issues including multi-robot coordination, user interface design, wireless communication, and mass production of robots.
Steve Cousins of Savioke discussed his new company’s goal to make robots that help people in human environments. Savioke aims to continue work in the spirit of the Robots for Humanity project begun at Willow Garage. Steve also touched on the power of open source software as a “lubricant” that moves the robotics field forward.
Allison Okamura of Stanford’s CHARM Lab presented on her work with patients with cerebellar trauma. Using an exoskeleton robot that tracks movement, Allison and her team are looking at ways to alter limb inertia and correct dysmetria in these patients. The ultimate goal of this and related research is to improve health and quality of life.
Thanks to Oussama Khatib, Pieter Abbeel, Sachin Patil and the other volunteers for putting on such a great event. We look forward to SBRS 2014!



Yesterday we hosted a hackathon at the OSRF office with the team from Unbounded Robotics. That makes us some of the first people to get a look at their new (ROS-based) robot!
We’re thrilled to support the Unbounded team as they get ready for their big debut, and as they continue to advance the field of personal robotics. From playing with image recognition and object retrieval, to teleoperation with the Oculus Rift 3D virtual reality headset to a 3D robot simulator, our team was excited to get a sneak peak of what will soon be released to the rest of the world. To stay up to date on the latest from Unbounded Robotics, follow them @unboundedrobotx.


Morgan Quigley took the stage on Wednesday in recognition of the TR35 Award bestowed on him by MIT Technology Review Magazine. The venue was emTech 2013 in Cambridge, Massachusetts. While Morgan admitted afterwards to a dose of nerves, you’d never know it based on the reaction from the audience.
Following fellow TR35 recipients with expertise in Big Data, a biophysisict working in wind power, and a nuclear scientist, Morgan regaled the crowd with the past, present and future of open source robotics.
The full presentation will be online soon courtesy of Technology Review and we’ll update this page as soon as we get our hands on it.
Cross-posted from the ROS blog.

You will find a number of ROS and ROS-Industrial related events at RoboBusiness:
ROS-Industrial is an open-source software framework for next-generation manufacturing automation. Be part of the community: Leverage advanced capabilities from the Robot Operating System (ROS) like mobile manipulation, on-the-fly path planning, collision avoidance, grasp planning, and 3D perception for your industrial robots and peripherals.
The ROS-Industrial Consortium members’ meeting will precede RoboBusiness. The Consortium is a membership organization providing cost-shared applied R&D for advanced factory automation. Consortium members drive new capabilities in ROS-I by championing Focused Technical Projects (FTPs) based on their near-term automation requirements. The ROS-Industrial Consortium Americas invites you to become a member and participate from 9 a.m. to noon on Wednesday, October 23, 2013, at RoboBusiness in Santa Clara, CA. Attendees will get the inside scoop on:
Registration
Registration is required. Please contact Paul Hvass (paul.hvass@swri.org) for a registration promotional code for early bird pricing of $895 (regardless of registration date) that will alert the event organizers that you plan to attend the Consortium meeting. If you are not currently a Consortium member but are considering membership, please contact us.
We look forward to seeing you there!

Last week, Hugo, Ian, Tully, and Brian were in Washington, DC for the first National Robotics Initiative meeting. In addition to presenting a poster, we taught a 2-hour tutorial using our latest web-based tools for managing and interacting with cloud-hosted simulations.

A couple of tutorial participants were even using Gazebo from their mobile devices:


It was great to see so many people from the US robotics community together in one place. One odd thing about the meeting was that, as it was held on the first two days of the new fiscal year, the federal government shutdown prevented any of the government folks from attending. It must be frustrating to organize such an event and then be told that you can’t go.
Recently, David Gossow at Willow Garage integrated the Oculus Rift virtual reality headset into RViz and, based on that, created a package for the PR2 robot called PR2 Surrogate. It lets you teleoperate a PR2 using the Oculus Rift and the Razer Hydra game controllers. We’ve been working closely with him to make this publicly available and are happy to announce its release into ROS Groovy Galapagos and Hydro Medusa.
The Oculus Rift is a virtual reality headset that gives you a fully immersive 3D experience by combining an extremely wide field of view and low latency head tracking. It is scheduled to be commercially available in 2014, but a developer kit can already be obtained. The Razer Hydra game controllers consist of two paddles you hold in your hands that precisely track their position and orientation in space. In addition, the controllers have the standard joysticks and buttons you find on a gamepad.