We’re happy to announce that videos and speakers’ slides from ROSCon 2014 have been posted, and are linked from the program page.
The videos can also be browsed here
Enjoy!

We’re happy to announce that videos and speakers’ slides from ROSCon 2014 have been posted, and are linked from the program page.
The videos can also be browsed here
Enjoy!
 OSRF is pleased to welcome Jackie Kay as a software engineer! Jackie has dreamed of open source robots taking over the world since 2011, when she assisted Prof. Matt Zucker with developing the curriculum for a ROS-based robotics course at Swarthmore College. She has also completed research at the Carnegie Mellon Robotics Institute in autonomous path planning for lunar rovers, mentored by Kevin Peterson at Astrobotic. She graduated Swarthmore in May and spent the summer as an intern at OSRF developing demos and tools for the Baxter Research Robot donated to us by Rethink Robotics. (You can view her work on GitHub.) She is excited to upgrade from intern to fully-fledged software engineer, and hopes this means the company will finally approve her plans for a fully automated beer delivery system using Baxter and a fleet of Turtlebots.
OSRF is pleased to welcome Jackie Kay as a software engineer! Jackie has dreamed of open source robots taking over the world since 2011, when she assisted Prof. Matt Zucker with developing the curriculum for a ROS-based robotics course at Swarthmore College. She has also completed research at the Carnegie Mellon Robotics Institute in autonomous path planning for lunar rovers, mentored by Kevin Peterson at Astrobotic. She graduated Swarthmore in May and spent the summer as an intern at OSRF developing demos and tools for the Baxter Research Robot donated to us by Rethink Robotics. (You can view her work on GitHub.) She is excited to upgrade from intern to fully-fledged software engineer, and hopes this means the company will finally approve her plans for a fully automated beer delivery system using Baxter and a fleet of Turtlebots.
Thanks to everyone for another fantastic ROSCon! It was a fun event, filled with great presentations and discussions, plus many of those, “we’ve Internet-known each other for years, but are now meeting for the first time,” moments. We’ll post the videos and slides as soon as we can, linking them from the program page.
Here’s the group at the end of the event (thanks to Chad Rockey for being our photographer):
And here’s one way to break down the demographics of the attendees, based on their type of affiliation: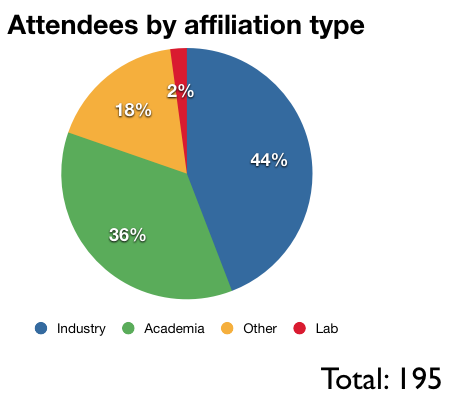
We’d like to thank our generous sponsors, especially: Qualcomm, Clearpath Robotics, Rethink Robotics, and Cruise Automation.
Our friends at RightHand Robotics recently posted more information on how they worked with OSRF and ROS to develop their new ReFlex Hand. We’d like to highlight the fact that OSRF’s contribution to the project, which included the controller board electronics, its firmware, and the low-level host-side driver software, is all available under an open source license, in the reflex-ros-pkg repository.
Thanks to Morgan and Gabby for their great work on the project!
To learn more, dive into the code, take a look at the video below, or check out their blog post.
Roboticists Now Able to Incorporate System-On-A-Chip Capabilities in Robot Designs and Applications
September 12, 2014 — MOUNTAIN VIEW, CA — Open Source Robotics Foundation (OSRF) today announced plans to extend the capabilities of ROS to Qualcomm ® Snapdragon™ 600 processors, a product of Qualcomm Technologies, Inc. (QTI), a wholly-owned subsidiary of Qualcomm Incorporated. Today’s announcement is made in conjunction with ROSCon 2014, the annual ROS Developer Conference. ROSCon runs from Sept. 12-13 in Chicago, IL. More information on the event is at http://roscon.ros.org/2014/
Via this agreement, OSRF will create and subsequently support a ROS release for Qualcomm Snapdragon 600 processors for both the Linux and Android operating systems. OSRF will test, refine, and fully integrate support for the ARM instruction set architecture into ROS development efforts. Once complete, OSRF will perform ongoing maintenance to generally support ROS on Qualcomm Snapdragon 600 processors.
The benefit to the worldwide robotics community working on the lower-power ARM chips means that robots can be smaller, more efficient, and have a longer battery life.
“As adoption of ROS continues to increase, our developer community wants to incorporate the latest computing platforms,” says Brian Gerkey, CEO of OSRF. “Given the intersection between robotics and mobile and embedded systems, we believe that offering Snapdragon’s SoC capabilities to our users will be a big hit.”
“Qualcomm Technologies is proud to join OSRF and the ROS community to create an official, supported release for Qualcomm Snapdragon 600 processors,” said Matt Grob, executive vice president and CTO, Qualcomm. “We’re excited about the potential for future innovation and invention in the robotics community with the combination of ROS and Qualcomm Snapdragon processors.”
ROS (for “Robot Operating System”) is a collection of tools and libraries that simplify the task of creating and programming robotic platforms and applications. ROS is overseen by OSRF, who make the OS freely available to any and all users via open source licenses. Since its introduction in 2007, ROS has grown to become the de facto OS for roboticists all over the world.
Availability
ROS for Qualcomm Snapdragon 600 processors will be available on the Linux OS and is anticipated to be available in Q4 2014 and on the Android OS in the first half of 2015. For more information on Qualcomm Snapdragon processors, please visit, https://www.qualcomm.com/#/products/snapdragon
About The Open Source Robotics Foundation
The Open Source Robotics Foundation (OSRF) is an independent non-profit organization founded by members of the global robotics community. The mission of OSRF is to support the development, distribution, and adoption of open source software for use in robotics research, education, and product development. More information on OSRF is available at www.osrfoundation.org or by following the company on Twitter @OSRFoundation
Media Contacts:
Tim Smith
Element Public Relations
tsmith@elementpr.com
415-350-3019
Qualcomm and Snapdragon are trademarks of Qualcomm Incorporated, registered in the United States and other countries. All Qualcomm Incorporated trademarks are used with permission.
We have an update from NASA’s Johnson Space Center (JSC): ROS is now up and running on Robonaut 2 (R2) aboard the International Space Station (ISS).

ROS was delivered to ISS aboard a SpaceX rocket as part of a recent resupply mission that also included a set of robotic legs that will be attached to R2 soon.
NASA was able to upgrade the R2 torso earlier this month after on-orbit surgery to remove old processors and electronics and install new ones. On August 12, R2 powered up using ROS for the first time.
As we mentioned in a prior post, the R2 team at JSC has been using ROS for R2 development on Earth for the last couple of years. They combine ROS with OROCOS RTT to produce a flexible development environment with real-time capabilities.
Allison Thackston and Julia Badger from the R2 team will be addressing the audience at ROSCon on the unique challenges of deploying software in space systems. Their presentation, “ROS in Space,” will open the second day of the conference. ROSCon takes place on September 12 and 13 in Chicago, IL. For more information and registration details, visit the ROSCon website.

This is a common scenario at Blue River Technology because the company is in the agriculture business. Blue River combines computer vision and robotics to deliver precision thinning to lettuce growers.

Blue River has been using ROS since late 2012. According to Willy Pell, Blue River’s Sr. Systems Engineer: “We love ROS because it makes it easy to find and correct errors in the worst possible circumstances. Any time something is wrong we know within a few dozen lines of code where the problem is presenting itself. It allows us to build systems The UNIX Way. In other words, we make simple, open source programs that communicate well with other programs.”
Blue River makes machines called lettuce thinners. Lettuce growers plant too many seeds because only 80% of seeds actually turn into plants. Since a lettuce head needs 10 inches on either side to get the resources it needs, growers must then thin the field of excess lettuce. Blue River’s machine is pulled behind a tractor and takes pictures of the plant seedlings. It identifies the ones to keep and the ones to kill and toggles a sprayer to render its verdict. There is finality to this machine. If it messes up it doesn’t just waste time, it impacts the grower’s yield.
Added Pell, “ROS has been a fantastic tool for us. I love how you can gut one node and not have it affect the rest of the system. I love how you can break the system apart and test subcomponents. Being able to confidently refactor, test and debug large parts of the system allows us to evolve extremely quickly.”

It never ceases to amaze and delight us when we learn of new and innovative uses of ROS. Just recently, ROS celebrated a celestial milestone when it arrived at the International Space Station as part of Robonaut 2. While Blue River’s solution is certainly more terrestrial it is no less innovative and impactful. Being able to deliver a precision agricultural solution to farmers means higher yield and fewer chemicals.
Because of the permissive open source license of ROS, we aren’t always aware of who is using ROS and for what purposes. In this case, we are very grateful to the team at Blue River for sharing their story with us.
If you are using ROS and have a story to share, please drop us a line at info@localhost.

This week at ICRA in Hong Kong, RightHand Robotics is announcing their new ReFlex hand. Built on over a decade of research in the Harvard Biorobotics Lab and the Yale Grab Lab, it leverages the best insights the team gained from the DARPA Autonomous Robotic Manipulation (ARM) program. The hand provides three mechanically intelligent underactuated fingers, highly sensitive tactile feedback, a solid electrical interface designed by OSRF, and (naturally) a ROS API!
If you’re at ICRA, find the RightHand team to see a live demo. Otherwise, here’s a video:
We learned recently from the folks at Avidbots that they’re developing ROS-based commercial cleaning robots. Here’s their story:
Billions of square feet of commercial floor space are cleaned nightly in the US. Avidbots automates the most time-intensive tasks of retail and storehouse cleaning: sweeping and scrubbing of floors. Powered by ROS, these robots automatically clean floors in grocery stores, airports, and malls, enabling cleaning staff to concentrate on higher value tasks such as window cleaning, dusting, and polishing. The end result? Staff who are better-paid and more productive — a clean win for everyone.
While developing these robots, Avidbots must iterate rapidly through designs. Two key facilitators of this fast development cycle are ROS and Gazebo. ROS’s communication system promotes a simple modular design, while Gazebo provides for accurate simulation testing. Modular software design and thorough simulation testing enable Avidbots to achieve its rapid development goals. This strategic use of ROS and Gazebo is significantly accelerating Avidbots’ entry into the robotic services space.

Our own Brian Gerkey is speaking today at Solid 2014 in San Francisco. In his talk, Brian will introduce the DARPA Robotics Challenge (DRC), present in detail the cloud-hosted Virtual Robotics Challenge component of the DRC, and discuss opportunities for the resulting open source simulation software to be an ongoing platform for robotics research, education, design, and product development.
Gzweb Mobile from OSRF on Vimeo.
During her Gnome Outreach Program for Women internship with OSRF, Louise Poubel made Gzweb work on mobile platforms by designing a mobile-friendly interface and implementing lighter graphics. Until recently, Gazebo was only accessible on the desktop. Gzweb, Gazebo’s web client, allows visualization of simulations in a web browser.
Louise implemented the graphics using WebGL. The interface includes menus suitable for mobile devices and multi-touch interactions to navigate the 3D scene. Louise conducted usability tests throughout the development phase in order to improve user experience and quickly discover and resolve bugs.
To optimize 3D rendering performance on mobile platforms, she also implemented a mesh simplifcation tool which allows users to choose how much to simplify 3D models in the database during the deployment stage and generate coarse versions of meshes to be used by gzweb.
Mobile devices have been, and will continue to be, a big part of our lives. With Gzweb Mobile, users can visualize simulations on mobile phones and tablets and interact with the scene, inserting shapes and moving models around.
References:
http://www.gazebosim.org
Gzweb wiki
Repositories:
Gzweb Bitbucket repository

Our own Nate Koenig is at the FIRST regional competition today and tomorrow in St. Louis. The kids are enjoying trying out the Gazebo simulation of the FIRST competition arena, which includes a forklift-equipped robot and some objects to interact with:


This simulation environment is being beta-tested with a few teams now. We hope that Gazebo will be available to all FIRST teams next year.
And of course our immersive virtual reality demo that combines Gazebo with the Oculus Rift headset and the Razer Hydra controller remains a hit:


CloudSim-Ed from OSRF on Vimeo.
During her Gnome Outreach Program for Women internship with OSRF, Ana Marian Pedro worked on CloudSim-Ed a prototype for a massive open online robotics course built with Google CourseBuilder. The course offers simulation tasks and challenges created with CloudSim, Gazebo and ROS.
To enroll in a course, a student must have a Google account and basic CloudSim credentials. CloudSim simulators are controlled from a custom module in CourseBuilder to launch simulation challenges and retrieve the score. When a challenge is launched, the Gazebo simulation world is viewed through a web interface, while an IPython notebook provides the means to interact with the simulated robot using ROS commands.
This project intends to provide students with a means to learn robotics using open source software. For schools with limited robotics laboratory space and equipment, the simulated worlds and environments give students a chance to experiment with minimal setup time and effort. This will hopefully reduce the time used in software troubleshooting when dealing with actual robot hardware.
References:
http://www.ros.org
http://www.gazebosim.org
http://cloudsim.io
https://code.google.com/p/course-builder/
Repositories:
https://bitbucket.org/ammpedro/cloudsim-ed-actuation
https://bitbucket.org/ammpedro/cloudsim-ed-web
https://sunlit-vortex-449.appspot.com/course
All of us at OSRF would like to wish everyone a happy National Robotics Week! There are events celebrating all things robotic all week long throughout the U.S. A full list of events can be found here. The folks at RoboWeek 2014 have even created some cool robot trading cards. Come and get ’em here. At least two of them are running ROS!
Closer to home, OSRF will be taking part in the Silicon Valley Robot Block Party. We will be among the many cool robotics companies showing off their wares. The event is this Wednesday, April 9, from 1:00 to 4:00 pm at WilmerHale in Palo Alto. Robot Block Party is a free event open to the public, so go ahead and spread the word.
And for those of you who can’t make it Wednesday, or simply can’t get enough of OSRF and ROS, please look for us on Thursday at Xconomy’s Robo Madness 2014. Hosted by Xconomy’s Wade Roush, Robo Madness takes place at SRI International from 1:00 to 5:40 pm so get yourself signed up right away. Our own Brian Gerkey will be on stage at 1:25 discussing ROS, and then again at 5:20 on a wrap-up panel discussion moderated by John Markoff of The New York Times.
As reported at HERE Three Sixty, their global fleet of hundreds of mapping cars is running ROS!

They carry laser range-finders, cameras, and GPS that are used to estimate the vehicle’s posisiton and gather 3-D pictures of the surrounding environment. That data gets shipped back to their headquarters for processing.
As HERE’s Michael Prados put it, “The system of sensors and computers means the software that’s needed is very like that which is used to create robots.” So they decided to build their cars’ software on ROS. The software runs on a headless server in the car’s interior, with the driver interacting via a mobile application on a tablet that he or she can operate easily from the seat.

“We chose the open source ROS because it was the best solution, hands-down,” Michael concludes. “And now we’re looking into the ways that we might give back to OSRF, and help its future success.”
Read the whole story at HERE Three Sixty.
Update (March 13): The launch has been delayed to the end of March.
Albert II is famous for being the first monkey in space, in June 1949. Laika is equally renowned for being the first animal to orbit the Earth, in 1957. On Sunday, March 16th, at 4:41am (unless inclement weather intervenes), ROS will celebrate its own celestial milestone when it is launched into space aboard a SpaceX rocket as part of a resupply mission to the International Space Station (ISS).


In conjunction with NASA’s Robot Rocket Rally March 14-16 at the Kennedy Space Center in Florida, SpaceX’s third mission will include a set of robotic legs for the Robonaut 2 (R2) humanoid torso that is currently aboard the ISS. Once those legs are attached to R2, ROS will officially be running in space.
For the last few years, the NASA/GM team at the Johnson Space Center has been using ROS for R2 development here on Earth. We first heard about that at ROSCon 2012 in Stephen Hart’s keynote presentation, where he described how they combine ROS and OROCOS RTT to achieve flexible, real-time control of R2. Following the launch this weekend, that open source software will be running on the R2 that’s on ISS.


The R2 team also uses the open source Gazebo simulator to simulate R2 when they’re doing development and testing. They’ve released their models of R2 and ISS as open source for the community to work with. We recently integrated those models into an immersive teleoperation Gazebo demonstration that we’ll be running at the Robot Rocket Rally this weekend. Drop by our booth and find out what it’s like to “be” Robonaut 2!
ROS has already powered robots in the air, on the ground, on and under the water, and on every continent, but we at OSRF couldn’t be more excited about ROS journeying to outer space.

The summer is well known for school holidays, baths in paradisiacal beaches, mojitos, … but nothing comparable to a Summer of Code! OSRF is participating in the 10th Anniversary of Google Summer of Code.
Do you want to spend your summer doing real-world software development, contributing to robotics projects like Gazebo, ROS, and CloudSim, and engaging with the global robotics community, all while getting paid? Then check out our GSoC 2014 site. You’ll also want to read through our ideas page, which lists projects that we’re interested in. Feel free to ask questions and propose suggestions at gsoc@localhost. The student application period starts March 10th. Get ready for a robotics coding summer!.
Next week, OSRF will be at the Robot Rocket Rally at the Kennedy Space Center (KSC) in Cape Canaveral! Stop by our booth between Friday, March 14 and Sunday, March 16th to try out one (or both!) of our Oculus Rift demos. Teleoperate a simulated version of NASA’s Robonaut-2 in the International Space Station, or try your hand at clearing rubble with the Atlas robot. You may have seen the Atlas robot compete in the recent DARPA Robotics Challenge Trials in Homestead, Florida.
The Robot Rocket Rally celebrates “the latest in robotic technology from NASA, industry leaders and universities.” The event coincides with the SpaceX launch that is delivering robotic legs to the Robonaut-2 aboard the ISS, along with life-sustaining supplies for those humans aboard.
Stop by our booth to play with the demos, have a chat, or pick up some stickers. Look for us in the big tent in the Rocket Garden!

Cross posted from ROS Blog
We’re pleased to announce that we will be hosting ROS Kong 2014, an international ROS users group meeting, in Hong Kong on June 6th, immediately following ICRA. This one-day event will complement ROSCon 2014, which will happen later in the year (see below).
ROS Kong 2014 will feature invited speakers, lightning talks, and Birds-of-a-Feather sessions. There will be plenty of time to meet other ROS users both from Asia and around the world.
If you are interested in attending, please save the date: Friday June 6th, 2014. We will be setting up registration and distributing more information in the coming month. We have a large auditorium but registration will be limited.
If you have any questions or are interested in sponsoring the event please contact us at roskong-2014-oc@localhost.
In related news, we are tentatively planning to hold ROSCon 2014 in Chicago in September, in conjunction with IROS. Stay tuned for more on that event.
Project Tango was just announced by Google’s ATAP group (http://www.google.com/atap/projecttango/). The project developed 3D localization and mapping capable of running in real-time on a phone. We expect the technology developed as part of Project Tango to be transformative for the robotics industry and are proud to have been a part of the process.
OSRF has been a partner with ATAP on the Tango project since May 2013. Our role was to bring our open source ROS (http://www.ros.org) software and expertise to bear on the problems that Tango is tackling. While Tango isn’t strictly a robotics project, there is a lot of similarity between their needs and what we have encountered over the years working with robots.
Among our contributions were developer tools for debugging, data logging, and data visualization. Project Tango used popular ROS tools, including rviz and rosbag, for development and debugging on a second screen, such as a desktop or laptop, both for live and recorded data.
Somewhat surprisingly, we also helped out with managing the complex code base that became Tango. With a large team of geographically distributed developers working at a furious pace, it’s not easy to keep track of the software in a project like this. Fortunately, we’re intimately familiar with this challenge from the past six years of ROS development. Project Tango was able to leverage the catkin build system developed for the ROS ecosystem to bring together the work from their many contributors.
In addition to integrating new code, catkin was used to integrate many existing libraries including familiar ROS dependencies such as OctoMap, OpenCV, and Eigen. To support both on-device and desktop debugging, catkin was used to enable compiling for Android devices as well as desktop targets from the same source tree.
Our work on Project Tango resulted in new features, bug fixes, and polish being added to many of our core tools, all of which have been made available to our community.
Having recovered from our exhilirating (and exhausting) trip to the DARPA Robotics Challenge (DRC) Trials in Florida, we’ve been mulling over the results of the Trials and looking back on the simulation-based Virtual Robotics Challenge (VRC) that we held in the summer.
As you’ll recall, the goals of the VRC were two-fold. First, we wanted to identify the teams from around the world who are the best at writing software for remote supervisory control of a humanoid robot in disaster response situations. After the VRC, the top seven teams were given access to an Atlas robot from Boston Dynamics, with which they then competed in the Trials. And because they only had a few months between receiving their robot
and heading to the Trials, the second goal of the VRC was to force teams to build and test their software in simulation so that they could be up and running with a working system as soon as they took delivery of the Atlas hardware.
Looking at the results, we’re feeling pretty good about the VRC. At the Trials, which saw sixteen teams compete, five of the top eight teams were previously top finishers in the VRC (the top eight from the Trials qualified for continued DARPA funding). And their relative performance at the Trials almost matched their relative performance in the VRC:
| Team | DRC Trials finish | VRC finish |
| IHMC Robotics | 2nd | 1st |
| MIT | 4th | 3rd |
| TRACLabs | 6th | 4th |
| WRECS | 6th | 2nd |
| TROOPER | 8th | 8th |
So a majority of the top teams at the Trials had first competed and won in simulation, and they were then able to transition their software from simulation to hardware in a very short period of time (they had also received a very capable Atlas robot, which surely contributed to their successes).
We’re proud of these results and we feel that they bode well for the use of simulation in future robotics projects, in competitions, and in education.
It’s also worth noting that team WRECS started out as an unfunded “Track C” team, yet placed 2nd in the VRC and 6th in the Trials, outperforming most of the fully funded teams along the way. Perhaps we’ll see more of this kind of non-traditional source selection in future programs.
Hugo, John, Morgan, Nate, and Steffi had a fantastic first day at the DRC Trials here in sunny, windy Florida. The demos are a huge hit with the crowd (especially all those kids who are here on field trips). Hundreds of people have tried their hands at controlling a Gazebo-simulated Atlas robot using the Oculus Rift and Razer Hydra. Here’s one happy participant:

There are so many awesome robots here; it’s a bigger production than you can probably imagine. Here’s Nate being interviewed live on the Jumbotron:

Check our Twitter feed for updates and more photos.
Oh, and the OSRF swag is going quickly, so if you’re at the event, stop by our booth soon!
OSRF is pleased to welcome Louise Penna Poubel, Tashwin Khurana, Binnur Görer and Ana Marian Pedro, our interns for the Outreach Program for Women!

Louise got her B.S. in Electromechanical engineering from Chiba University in 2011 and her double M.S. from the European Master in Advanced Robotics (EMARO) at Warsaw University of Technology and Ecole Centrale de Nantes in 2013. Her masters research focused on whole-body online imitation of human motion by humanoid robots, using the Nao robot and the Kinect sensor. At OSRF, she will be adapting the WebGL interface of Gazebo to work on mobile devices. In her free time, she enjoys 3D printing, puzzles, traveling and extreme sports.
Louise’s blog: http://myshumi.net/
Tashwin is pursuing a Master’s in Computer Science at Lehigh University. She has been working at the VADER lab (Vision, Assistive Devices, and Experimental Robotics Laboratory) with Prof. Dr. John Spletzer for over a year and loving every minute of it! Tashwin has been focusing on the Lehigh Mapping Trike project, which will be used as a means to construct large-scale, three-dimensional maps in outdoor pedestrian zones. As an OPW intern, Tashwin will be building an Open Street Maps (OSM) API plugin for the Gazebo Simulator.
Tashwin’s blog: http://khuranatashwin.wordpress.com
Binnur is a Ph.D. student at the Department of Computer Engineering, Boğaziçi University. She has recently completed her MSc. thesis which is titled “Developing a Fitness Coach Robot for Elderly People in Assisted Living Environments”. Binnur’s supervisor is H. Levent Akin. She is a member of the Robotics Research Group and the Cerberus RoboCup Standard Platform League Team. Binnur’s research focuses on social robotics. As an OPW intern, she aims to integrate an SDF editor into Gazebo. This contribution will allow users to make changes in the current model while the simulator is running.
Binnur’s blog: http://robot.cmpe.boun.edu.tr/~binnur/
Ana Pedro is an M.Sc. Computer Science Candidate and a member of the Center for Automation Research in De La Salle University, Manila. She is currently working on her thesis on mobile robot localization and is interested in developing robotic applications for children and education. Ana Pedro will be working on an educational challenge using CloudSim, ROS and Gazebo.
Ana Pedro’s blog: http://thelittlerobotblogs.wordpress.com
We’re excited to see the work that Louise, Tashwin, Binnur and Ana Pedro will be doing over the next few months. Check their blogs often to follow along with their experiences and contributions!
In just a few short days, OSRF will be flying out to the DARPA Robotics Challenge Trials in Homestead, Florida! The DRC Trials will take place at the Miami-Homestead Speedway on Friday, December 20, and Saturday, December 21. OSRF played a pivotal role in the DARPA Virtual Robotics Challenge back in June, and we’re very excited to attend the next stage of the competition and have the opportunity to watch real robots in action! A total of 17 teams qualified for the Trials, and their robots will be competing on 8 tasks including vehicle driving, ladder climbing, hose manipulation, and more.
While we’re itching to gawk at the awesome robots all day long, we’ll also be hanging out in the OSRF booth at the Expo. We’ll set up shop with a number of demos, videos, and of course lots of OSRF swag. Come on by and try to get the high score on our TurtleBot racing game, or check out the Sandia hand, which can be seen on some of the competing Atlas robots. You can also try your hand at clearing rubble with a Gazebo-simulated Atlas robot. You’ll be fully immersed in the robot’s world once you strap on the Oculus Rift and have a look around. You’re guaranteed to look like a winner in the process.
Stop by our booth to chat, play with our demos, pick up some free stuff, or just observe us awkwardly.

Join the Cool Kids Club by trying out our Atlas Rubble Clearing Demo!

Cruise around a simulated racetrack in our TurtleBot racing game.
Looking for that perfect Christmas present? Look no further. For a very reasonable amount you can buy that certain someone a ticket to hear OSRF CEO Brian Gerkey at The Commonwealth Club of California.
Brian, along with Rich Mahoney from SRI and Steve Henn from NPR, will be discussing “Robots in Unconventional Workplaces.”
Date: Wednesday, February 26, 2014
Time: 6:00 pm
Where: SF Commonwealth Club
595 Market Street, 2nd Floor
San Francisco, CA
(directions)
RSVP: Here
Given OSRF’s involvement in the DARPA Robotics Challenge, we know Brian will have lots to offer on the evening’s topic.
Cross-posted from the ROS blog.
When we started work on ROS, like most young open source projects, our greatest need was to recruit early adopters and fellow developers. So we targeted that audience: we built a wiki, filled it with documentation, tutorials, and code examples, and made the wiki the landing page at www.ros.org.
Well, times have changed. Now, six years into the project, we have a broader audience to consider. We want to reach teachers who are considering using ROS in their classrooms, managers who want to use ROS in a new product, journalists who are writing stories about ROS, and many, many others.
So, in celebration (just a bit late) of ROS’s sixth birthday, we’re pleased to present a new www.ros.org.


After all, a grown-up ROS deserves a grown-up website. Don’t worry: the wiki is still there, as are all the other ROS sites on which we depend.
Btw, like most things we do, the website itself is at GitHub. If you run into a problem or have an idea for improving the site, open an issue and we’ll have a look.

Happy Halloween from OSRF!
Including Jose, in Spain:


For any parents feeling guilty about all the candy their kids will be eating this week, there’s no better antidote than a healthy dose of educational fun. That’s exactly what’s in store this Saturday at the Bay Area Science Festival.
Some of us from OSRF will be bringing a few TurtleBot robots up to San Francisco to take part in the Robot Zoo. The Robot Zoo is a featured attraction at the Festival’s Discovery Days at AT&T Park this Saturday, Nov. 2, from 11:00 a.m. to 4:00 p.m.
Organized by Silicon Valley Robotics, the Robot Zoo is taking over Willie Mays Plaza and will feature fellow Willow Garage spin-offs Unbounded Robotics, who will be showing off their brand-new UBR-1 robot, and Suitable Technologies who will be showing off their Beam.
Details, logistics, and more information is here.

Open Source Robotics Foundation is a participating organization in the latest GNOME Outreach Program for Women.
In an effort to get more women involved in free and open-source software and robotics, OSRF is offering Outreach Program for Women internships from December 10, 2013 to March 10, 2014. The application deadline is November 11, 2013. Before the application deadline, applicants must get in touch with OSRF to discuss the individual projects they are interested in working on.
Participants will work remotely from home, while getting guidance from an assigned mentor and collaborating within their project’s team and the rest of the community. The projects include software development, web development, 3D modeling, user experience, and/or graphic design. Feel free to email us with additional proposals if you do not see one that fits perfectly. The stipend for the program is $5,000 (USD). Any woman who has not previously participated in the Outreach Program
for Women or Google Summer of Code is welcome to apply.
Check out the list of potential ideas for the program. Feel free to ask questions and propose suggestions at opw@localhost

Last week was an exciting one in the robotics community, as hundreds of people and dozens of robotics-related companies descended on RoboBusiness 2013 in Santa Clara, CA; just down the road from OSRF headquarters.
In all the enthusiasm and bot-gawking, we wanted to point out some exciting ROS-related news that might be have been overlooked. Rethink Robotics, the company behind Baxter, enhanced the open source capabilities of their research robot.
The Baxter Research Robot now:
Those of you who have followed OSRF’s contributions to the DARPA Robotics Challenge, in particular the Virtual Robotics Challenge are already familiar with the capabilities of Gazebo and MoveIt!, but it’s great to see another top-notch robotics company embrace and extend ROS.
We had the opportunity to host Dave Coleman this past summer and witness the rise of Baxter in both reality and simulation. Dave worked closely with Gazebo, ROS, and Rethink to simulate Baxter and develop its controllers. His hard work helped the Rethink team deliver Baxter SDK version 2.0, and added another simulated robot for the robotics community.

Last Friday, UC Berkeley hosted the first ever Stanford-Berkeley Robotics Symposium (SBRS ’13). A number of OSRF employees were in attendance, and Steven Peters presented on one of our latest projects combining the use of iPython Notebook with gzweb, a Gazebo WebGL client. His presentation included an inspiring video of a stack of simulated dumpsters falling on a Stonehenge-like arrangement of many giant dual-link robot arms, in front of a typical neighborhood gas station. You had to be there.
Steven was one of approximately 36 presenters, each of whom were allotted 10 minutes to speak. Talks ranged from academic to industry-focused, and covered a broad spectrum of robotics topics from mass-producing robots and robotics consulting, to computer vision and modeling human decision making. Following is just a small sampling of the many great talks from SBRS 2013.
Mark Palatucci of Anki spoke about Anki Drive (available soon in Apple retail locations), and the company’s goal of “combining the emotion of physical products with the magic of video games.” The Anki Drive project tackles a variety of issues including multi-robot coordination, user interface design, wireless communication, and mass production of robots.
Steve Cousins of Savioke discussed his new company’s goal to make robots that help people in human environments. Savioke aims to continue work in the spirit of the Robots for Humanity project begun at Willow Garage. Steve also touched on the power of open source software as a “lubricant” that moves the robotics field forward.
Allison Okamura of Stanford’s CHARM Lab presented on her work with patients with cerebellar trauma. Using an exoskeleton robot that tracks movement, Allison and her team are looking at ways to alter limb inertia and correct dysmetria in these patients. The ultimate goal of this and related research is to improve health and quality of life.
Thanks to Oussama Khatib, Pieter Abbeel, Sachin Patil and the other volunteers for putting on such a great event. We look forward to SBRS 2014!



Yesterday we hosted a hackathon at the OSRF office with the team from Unbounded Robotics. That makes us some of the first people to get a look at their new (ROS-based) robot!
We’re thrilled to support the Unbounded team as they get ready for their big debut, and as they continue to advance the field of personal robotics. From playing with image recognition and object retrieval, to teleoperation with the Oculus Rift 3D virtual reality headset to a 3D robot simulator, our team was excited to get a sneak peak of what will soon be released to the rest of the world. To stay up to date on the latest from Unbounded Robotics, follow them @unboundedrobotx.


Morgan Quigley took the stage on Wednesday in recognition of the TR35 Award bestowed on him by MIT Technology Review Magazine. The venue was emTech 2013 in Cambridge, Massachusetts. While Morgan admitted afterwards to a dose of nerves, you’d never know it based on the reaction from the audience.
Following fellow TR35 recipients with expertise in Big Data, a biophysisict working in wind power, and a nuclear scientist, Morgan regaled the crowd with the past, present and future of open source robotics.
The full presentation will be online soon courtesy of Technology Review and we’ll update this page as soon as we get our hands on it.
Cross-posted from the ROS blog.

You will find a number of ROS and ROS-Industrial related events at RoboBusiness:
ROS-Industrial is an open-source software framework for next-generation manufacturing automation. Be part of the community: Leverage advanced capabilities from the Robot Operating System (ROS) like mobile manipulation, on-the-fly path planning, collision avoidance, grasp planning, and 3D perception for your industrial robots and peripherals.
The ROS-Industrial Consortium members’ meeting will precede RoboBusiness. The Consortium is a membership organization providing cost-shared applied R&D for advanced factory automation. Consortium members drive new capabilities in ROS-I by championing Focused Technical Projects (FTPs) based on their near-term automation requirements. The ROS-Industrial Consortium Americas invites you to become a member and participate from 9 a.m. to noon on Wednesday, October 23, 2013, at RoboBusiness in Santa Clara, CA. Attendees will get the inside scoop on:
Registration
Registration is required. Please contact Paul Hvass (paul.hvass@swri.org) for a registration promotional code for early bird pricing of $895 (regardless of registration date) that will alert the event organizers that you plan to attend the Consortium meeting. If you are not currently a Consortium member but are considering membership, please contact us.
We look forward to seeing you there!

Last week, Hugo, Ian, Tully, and Brian were in Washington, DC for the first National Robotics Initiative meeting. In addition to presenting a poster, we taught a 2-hour tutorial using our latest web-based tools for managing and interacting with cloud-hosted simulations.

A couple of tutorial participants were even using Gazebo from their mobile devices:


It was great to see so many people from the US robotics community together in one place. One odd thing about the meeting was that, as it was held on the first two days of the new fiscal year, the federal government shutdown prevented any of the government folks from attending. It must be frustrating to organize such an event and then be told that you can’t go.
Recently, David Gossow at Willow Garage integrated the Oculus Rift virtual reality headset into RViz and, based on that, created a package for the PR2 robot called PR2 Surrogate. It lets you teleoperate a PR2 using the Oculus Rift and the Razer Hydra game controllers. We’ve been working closely with him to make this publicly available and are happy to announce its release into ROS Groovy Galapagos and Hydro Medusa.
The Oculus Rift is a virtual reality headset that gives you a fully immersive 3D experience by combining an extremely wide field of view and low latency head tracking. It is scheduled to be commercially available in 2014, but a developer kit can already be obtained. The Razer Hydra game controllers consist of two paddles you hold in your hands that precisely track their position and orientation in space. In addition, the controllers have the standard joysticks and buttons you find on a gamepad.
Last week, OSRF went to the Ground Robotics Symposium organized by the National Defense Industrial Association (NDIA). Morgan was in a panel discussion about the use of open architectures in defense projects. ROS is an example of an open software architecture, where many contributors create software modules that connect at runtime to compose large systems. The other panelists provided interesting examples of how open-architecture principles can also include swappable hardware components, such as the Advanced Explosive Ordinance Disposal Robot System (AEODRS) program, among others.

Last week, OSRF went to CloudBeat. Hugo was in a panel discussion about the selection of Cloud provider infrastructure. Inspired by the success of the Virtual Robotics Challenge (VRC), OSRF is continuing the development of CloudSim, which allows us to run Gazebo simulations, both on the Amazon Web Services (AWS) virtual cloud and the SoftLayer bare-metal cloud. In parallel, we’re also exploring OpenStack private cloud support, and are looking forward to the advent of GPU virtualization technology and the upcoming cloud gaming industry.
Hugo got a chance to meet with Duke Scarda, CTO of Softlayer, our cloud partner for the VRC, and Mike Miller of Cloudant. Mike was insightful in comparing AWS to the iPhone and OpenStack to Android of a few years ago: the iPhone was certainly the visionary leader and first to market. We should see interesting developments in the coming months as the industry seems to be rallying around OpenStack and SDN (Software Defined Networking)… prompting Amazon and VMWare to reinvent themselves.
Let us know what you’d like the ROS cloud to be like.
[Cross-posted from the Google Open Source blog]

The Open Source Robotics Foundation (OSRF) has a clear mission: “To support the development, distribution, and adoption of open source software for use in robotics research, education, and product development.” We have three exciting Google Summer of Code projects contributing to CloudSim, Gazebo, and ROS, which currently represent three of our biggest open source efforts.
Esteve Fernandez has been adding support for OpenStack to CloudSim, a project developed by OSRF to run robotics simulations in the cloud. CloudSim was used to support the DARPA Virtual Robotics Challenge and currently supports the Amazon and SoftLayer clouds. Esteve added support for private clouds to CloudSim, enabling organizations to run simulations on their own networks. Furthermore, Esteve is contributing to CloudSim by fixing bugs, improving the code base and helping with any task that comes up. In the following weeks, he will be making CloudSim constellations accessible to users in an OpenStack cloud provided by OSRF as a public service.
Andrei Haidu is developing a fluid dynamics physics engine for the Gazebo robot simulator that will enable the use of aerial and underwater vehicles in simulation.
Gonzalo Abella is developing a new parameter server prototype for ROS. He is exploring making all parameters dynamic, and integrating the capabilities of the dynamic_reconfigure package into the core API.

Congratulations are in order. OSRF’s own Morgan Quigley was announced today as a recipient of MIT Technology Review’s annual list of 35 top young innovators. For his work in robotics software and electronics, Morgan has been honored as an outstanding inventor on the list.
There are very few individuals in the technology industry with the moniker of ‘The Godfather,’ but Morgan is one of the few. If you search for ‘Godfather of ROS’ you will find links to Morgan’s work, including the opening keynote of the inaugural ROSCon 2012 conference.
“This is a wonderful recognition of Morgan’s contributions to the world of robotics,” said Brian Gerkey, CEO of OSRF. “I’ve said this many times: if you’ve done anything with ROS, you’ve used Morgan’s code.”
Morgan joined OSRF in August 2012 after completing his dissertation defense in the Stanford Artificial Intelligence Laboratory. While at Stanford, Morgan developed hardware and software systems for personal robots, including the design and initial implementation of ROS in close collaboration with colleagues, including two of whom (Brian Gerkey and Tully Foote) are now at OSRF. On the hardware side, Morgan was the electrical and software designer for the low-cost, highly dexterous hand produced for the 2010-2012 DARPA ARM-H program on a team led by Curt Salisbury of Sandia National Laboratories.
“Over the years, we’ve had success in choosing women and men whose innovations and companies have been profoundly influential on the direction of human affairs,” said editor in chief and publisher Jason Pontin. “Previous winners include Larry Page and Sergey Brin, the cofounders of Google; Mark Zuckerberg, the cofounder of Facebook; Jonathan Ive, the chief designer of Apple; and David Karp, the creator of Tumblr. We’re proud of our selections and the variety of achievements they celebrate, and we’re proud to add Morgan to this prestigious list.”
Morgan and the rest of this year’s honorees are currently featured at technologyreview.com, and in the September/October print magazine, which hits newsstands on September 3. Morgan will also appear in person at the upcoming EmTech MIT conference from October 9-11 in Cambridge, Massachusetts.
[Cross-posted from the ROS blog]

With the imminent release of ROS Hydromedusa, we are happy to continue the tradition of releasing great artwork to accompany great software.
This time we’re trying something new: to make ROS Hydromedusa T-shirts available to everyone, we’re running a campaign on TeeSpring. This is a limited time offer; by pooling resources and ordering shirts at the same time, we can keep costs down for everyone.
Please show your support of ROS by ordering a shirt! Proceeds from shirt sales will primarily cover the cost of the logo design, with any excess to be used for future ROS maintenance and development.
It’s a 3-week campaign, with 2 weeks and 6 days left. We need at least 150 shirt orders by the end of the campaign to make the purchase. Orders in the US should arrive within 2 weeks of the end of the campaign; allow an extra week for international orders.
There are a variety of men’s and women’s sizes and TeeSpring supports international shipping.
We recently received a Baxter Research Robot, generously donated to OSRF by Rethink Robotics. Here’s the time-lapse series of the assembly and installation:
With help from our friends at Rethink and Willow Garage, we already have Baxter simulated in Gazebo and integrated into MoveIt! for motion planning and control.
We’re excited to be able to experiment with this new ROS-based robot.

Last week, we had a pre-Fourth of July BBQ! We were joined by about a hundred local robot aficionados in celebrating a number of exciting milestones. The tasty BBQ fare arrived in the form of a food truck.


We were a little late in throwing an office-warming party, so instead we decided to celebrate our one-year anniversary in the building, along with our 1+ year existence as a company. We were also very excited to celebrate the successful completion of the Virtual Robotics Challenge (VRC).
Partygoers were treated to VRC highlight videos, the opportunity to try some VRC tasks, and ROS/Gazebo/MoveIt! demonstrations with our recently received Baxter Research Robot (thanks, Rethink!).
Dave was especially excited to get the Baxter demos working.


OSRF is pleased to welcome Heather Boortz as a summer intern! Heather is currently at Olin College, a small engineering school just outside of Boston, working on her BS in Engineering, focusing on computer engineering and robotics. She is excited to be out here working on the CloudSim team.

After much anticipation, the winners of the DARPA Virtual Robotics Challenge (VRC) have been announced! Twenty-six teams from around the world qualified to compete in the VRC. Teams were judged on a number of factors, including the number of points earned in each task, the amount of bandwidth used when communicating with the robot, and the speed at which each task was completed. The results are posted in this DARPA news release . Congratulations to all of the teams that participated for their superb work during this competition!
The VRC was the first of three competitions that make up the DARPA Robotics Challenge (DRC). Teams were given three main tasks to complete, and had five opportunities to complete each of the three tasks, with slight variations present in each attempt. The three main tasks were as follows: 1) Walk to a utility vehicle, get into the vehicle, drive it along the road and around obstacles, get out of the vehicle, and walk through the final gate. 2) Walk across varying terrain, including mud, over uneven terrain, and through a rubble-strewn field. 3) Walk to a fire hose, pick it up, screw the hose into a pipe, and turn a valve. These sample tasks reflect some of the actions required of rescue workers in disaster response scenarios. DARPA began with this virtual competition because the software to control advanced robots for disaster response is a critical prerequisite to making such robots work in the real world.
At OSRF, we’ve spent the last year building on top of Gazebo to create the DRC Simulator, which was used in the VRC. We have improved many aspects of Gazebo, including the physics models, sensor capabilities, real-time factor, and model accuracy and capabilities. In addition, we made it possible to run simulations in the cloud, making simulation-based work more accessible to folks interested in robotics. We’d like to thank all of the teams for their feedback, contributions, and support during the development phase of the VRC. The work we’ve done on the Simulator is, of course, all open source and available to anyone interested. Over the next few years, we will continue to improve Gazebo and aim to support and facilitate future robotics R&D.
We are not only honored to have been selected by DARPA to work with them on this stage of the DRC, but also proud of the fact that the Simulator will continue to be a resource for robot research and development in the future.
Again, congratulations to the winning teams for their truly impressive efforts and creativity in solving the VRC’s difficult tasks. We’re very excited to see what happens in the next round of the DRC.
For more information, see the DARPA VRC Winners Announcement.
You can see DARPA’s VRC overview video here .
You can also have a look at the VRC driving task, walking task, and firehose manipulation task.
It has been a long and exciting process, and the winners of the Virtual Robotics Challenge are set to be announced tomorrow.
Shortly after the announcement, Gill Pratt from DARPA and Nate Koenig from OSRF will host a Reddit chat where you have the opportunity to pose your own questions about the VRC, the current state of robotics, the ongoing role of the Simulator, and (almost) anything else.
We will start taking questions for the Reddit chat at 12:30 p.m. EST tomorrow, June 27, and answer questions from 1:00 p.m. to 2:00 p.m. EST.
More details on how to access the Reddit chat will be published on our blog tomorrow, and also via @OSRFoundation and @DARPA
UPDATE: Check out the AMA here.
After 74 exciting and grueling hours of staffing the OSRF office around the clock, the Virtual Robotics Challenge (VRC) is finished! The first teams began competing in Japan last Monday afternoon PDT, and the final competition task was completed shortly after 6 pm last Thursday PDT. Over the course of those three days, we saw many creative and impressive solutions to the difficult VRC tasks.
We’re excited to see the final results this coming Thursday, June 27. Stay tuned to find out which teams won an ATLAS robot!
For more information, visit http://theroboticschallenge.org .

OSRF is pleased to welcome Dave Coleman as a summer intern! Dave is a PhD student at the University of Colorado Boulder under Prof. Nikolaus Correll. His research interests include motion planning, grasping and perception. Dave is a strong believer in the community-driven open source ROS project and is happy to be returning to OSRF after his last summer’s internship at Willow Garage.
As of Monday at 4 pm local time, the Virtual Robotics Challenge (VRC) is underway! The VRC is the first of three competitions that make up the DARPA Robotics Challenge (DRC), and up to six winning teams will be awarded an ATLAS robot, along with additional funding. We’ve been working hard in the months leading up to the VRC, and are excited as teams begin competing across the world. Stay tuned because the VRC winners will be announced on June 27!
For more information, visit http://theroboticschallenge.org .
The week of June 3rd, 2013, William visited SwRI to help teach the first ROS-Industrial Training Class. Check out some photos of the event at the ROS-I blog!


OSRF is pleased to welcome Gonzalo Abella, Esteve Fernandez and Andrei Haidu, our first-ever students for the Google Summer of Code!
Gonzalo is an M.S. student at Universidad Rey Juan Carlos. He is a member of the Spiteam RoboCup SPL team. For the last two years, he has been involved in medical research using the Nao robot in therapies for people with Alzheimer’s. As a GSoC member at OSRF, he hopes to improve ROS core by developing a new Parameter API.
Esteve is an M.S. student at Universitat Pompeu Fabra, advised by Prof. Vladimir Estivill-Castro and Prof. Jorge Lobo, and a member of the UPF-Griffith RoboCup Standard Platform team. His research focuses on multirobot localization and coordination in unreliable networks. He holds an M.S. in Computer Engineering from Universitat Oberta de Catalunya and a B.S.E. in Computer Engineering from Universitat de Barcelona. A frequent contributor to free and open source software, Esteve is a PMC member of Apache Thrift and a committer at Twisted, and has given talks at PyCon US and Europython.
Andrei is a fourth semester M.S. student in Informatics at the Technical University of Munich (TUM), majoring in Software Engineering. Since 2011 he has been working in simulation at the IAS Group from TUM, currently The Institute for Artificial Intelligence (IAI) since the group has moved to the University of Bremen.
We’re excited to work with Gonzalo, Esteve, and Andrei in the coming months, and look forward to their contributions this summer!

While Memorial Day is the unofficial first day of summer and most people turn to thoughts of barbeques and vacations, the situation here at OSRF is much different. That’s because it’s only a matter of days until the DARPA Virtual Robotics Challenge (VRC).
There’s lots of information on the DARPA Robotics Challenge (DRC) website at http://www.theroboticschallenge.org, but the immediate task before us is a key stage in the DRC where all qualifying teams will run their robots through a computer simulation of some of the anticipated tasks from the live DRC events.
OSRF has developed a simulator for DARPA (more details of our relationship are available at FBO.gov), with the plan that the virtual test environment will play a catalyzing role in development of future robotics technology, allowing new hardware and software designs to be evaluated without the need for physical prototyping. The simulator is an open-source, real-time, operator-interactive virtual test bed, with models of robots, robot components, and field environments.
Needless to say, all of us at OSRF are focusing on making the VRC a big success.
May 31 was the last day for teams to qualify for the VRC, and qualifying teams are able to practice until June 8.
The VRC takes place from June 17 to June 27, and DARPA will announce soon after which teams will advance to the DRC Trials taking place in December 2013.
Details of the DRC events, track structure and participating teams can be found at http://www.theroboticschallenge.org/local/images/DRC_Schedule.png.

We’re happy to announce that we’ve posted videos of the ROSCon 2013 talks, along with speakers’ slides. They’re linked from the program page. Clear your calendar; that’s over 16 hours of ROSCon content.
Slides and/or video are missing for a few of the talks. They’ll trickle in over time. We’re also expecting to get photos from the official photographer soon. In the meantime, attendee photos are coming together on G+.
The final registration count was 288, up 37% from 2012. Thanks again to everybody for coming! And thanks to our sponsors, without whom we couldn’t put on such an event.

OSRF is pleased to welcome Ben Charrow! Ben is a PhD student at the University of Pennsylvania advised by Prof. Vijay Kumar and Prof. Nathan Michael. His research focuses on how to enable teams of robots to gather information about the world around them. Ben is a big believer in the power of ROS. He even used it to build a tele-operated robotic ring bearer for his wedding. At OSRF he hopes to improve ROS support for multi-robot systems.

OSRF is pleased to welcome Sarah Elliott! Sarah is a software engineering intern at OSRF. She is currently completing her BASc in Systems Design Engineering at the University of Waterloo. She spent two previous internships at Willow Garage working on Android control of robots and the mobile manipulation tool MoveIt. At OSRF Sarah will once again be focusing on Android and ROS compatibility, with the goal of allowing developers to easily create apps for robots.
Can you believe that ROS-Industrial is already 1 year old? Here’s a great montage video showing the variety of things that have been accomplished in that time:
Update: Attendee photos are coming together in on G+.
We just closed another successful ROSCon here in Stuttgart. We had about 300 people this year, up 50% from 2012. There were many great talks and demos, and an impressive exhibition area. We’ll post more in the next days after we’re home and get some rest. For now:

[Cross-posted from the ROS-Industrial blog]
The Open Source Robotics Foundation (OSRF) will participate in the upcoming ROS-Industrial Training Class, June 4-6. OSRF will provide training for the new features and capabilities of the ROS Groovy release, particularly focusing on Catkin, the new software build system. OSRF will be available to respond to questions you may have about the ROS core, past, present, and future. The class will provide a hands-on introduction to ROS and ROS-Industrial, and it will culminate with hardware integration exercises with live industrial robots and peripherals. The class is FREE to Full/Associate Members of the ROS-Industrial Consortium. Others may attend for a fee.
Please note that class registration is only open until May 18th. We also encourage attendees to buy a small form factor PC to take home after the class. The PC will have Ubuntu, ROS, and ROS-I preinstalled, allowing developers to hit the ground running with ROS-I development. We are selling the PCs at cost; the first ten buyers will receive them at the sale price that we negotiated. Later units are subject to price change.

As the Lead User Experience (UX) Designer at OSRF, I’m very excited to see more users contributing their time and effort to improving the ROS and Gazebo software. As these communities continue to grow, it becomes even more important to consider the usability of ROS and Gazebo, along with the related documentation. By designing user-friendly software and support documents, we make our work more accessible to the broader robotics community, and encourage more novice users to hop on the ROS/Gazebo bandwagon. Addressing usability in our work and designing with our users’ best interests at heart becomes even more critical as society as a whole begins interacting more with robots. Robots and robot software no longer exist exclusively in research labs. They’re working next to people in manufacturing environments, enabling people with paralysis to walk , and helping educate children in schools . Robots are becoming ubiquitous, and as this happens, our work on ROS and Gazebo helps shape the future of robotics and the integration of robots into everyday life. By identifying and designing for our users’ needs, we help advance the state of robotics by making robots more useful, usable and enjoyable to use.
At OSRF, I conduct as many usability testing sessions as we can manage given our project timelines. While we would always benefit from more, the testing we do have time for yields excellent feedback that helps us produce new features with more usable layout, interactions and functionality. While it certainly helps to have a UX Designer such as myself on the payroll, anyone can do usability testing. To encourage all of you, I’ve added a Usability Resources page to our wiki. There, you’ll find information on usability studies, heuristic evaluation, hand-drawn prototypes, and more. Have a look around and give the methods a shot.
There are a lot of awesome robots and robot applications in our future, and with some dedication to making them accessible and usable, we can significantly impact how the general public perceives and interacts with the robots we put out into the world.

The user experience should be considered throughout the development of a product, not just before or after. (Credit: Based on Ben Melbourne’s image)
The many components of User Experience Design. (Credit: By Thomas Glaser, based on Dan Saffer’s work)

Gazebo Terrain Modification Tool paper prototype for user testing.

The synthesis phase of a full-fledged iteratively-designed project. (Credit: Paul Caravelli and John Horstman)

OSRF is pleased to welcome Dirk Thomas! Dirk has more than 6 years of professional software development experience. He received his PhD in Computer Science from the Technische Universität Darmstadt in 2010, which was concentrated on Robotics Middleware.
Dirk has been a successful RoboCuper since 2003 as part of the Darmstadt Dribbling Dackels in the Sony Aibo league as well as the Humanoid Kidsize team Darmstadt Dribblers. Before joining OSRF, Dirk worked at Willow Garage leading the development of the new build system in ROS during the Groovy release, developing the framework for Qt-based graphical ROS tools rqt and maintaining the core ROS packages. Dirk is excited to join OSRF and will be working on the next generation of ROS as well as improving the supporting infrastructure.
OSRF folks know that students love Open Source software, Robotics and flip flops. Do you want to spend your summer doing real-world software development, contributing to robotics projects like Gazebo, ROS, and CloudSim, and engaging with the global robotics community, all while getting paid? Then check out our GSoC 2013 site. You’ll also want to read through our ideas page, which lists projects that we’re interested in. Feel free to ask questions and propose suggestions at gsoc2013@localhost. The student application period starts April 22nd. Get ready for a robotics coding summer!.

OSRF is pleased to welcome Tully Foote! Tully has been a core ROS developer for many years, and he is looking forward to continuing that work. Tully attended Caltech and UPenn earning his BS and MS while working on all three of the the DARPA Grand Challenges. He most recently has been working on ROS at Willow Garage as well as many other projects including designing the TurtleBot.

OSRF is pleased to welcome Paul Mathieu! Paul is a software engineering intern with the ROS Team and works on bringing binary support for ROS on ARM platforms. He recently obtained a MSc. in Robotics at the University of Tokyo where he was working on indoor navigation of a quadrotor UAV with an on-board depth camera, and a MSc. in Aerospace Engineering from Supaero (France). Recently arrived from France, he enjoys California’s lifestyle and clement weather.

OSRF is pleased to welcome William Woodall! William is a Software Engineer and a robotics enthusiast. He joined the Open Source Robotics Foundation as a member of the ROS development team in February of 2013. Before that he worked at Willow Garage on general ROS development and supporting internal Willow Garage projects. Before that, he built an awesome autonomous lawnmower. He will apply his software engineering and design skills to improve the state of open source robotics at OSRF.
[Cross-posted from the ROS blog]

We’re pleased to announce that the ROS project will soon be hosted by Oregon State University’s Open Source Lab (OSL). The OSL provides services to many open source communities. We are pleased to join the ranks of projects like Drupal and kernel.org. We’d like to thank Willow Garage for providing hosting and infrastructure for the entire ROS community for over 5 years.
We’d also like to thank Lance Albertson, Carlos Jensen, and Bill Smart for welcoming us to the OSL. We look forward to working with Oregon State and the OSL to provide ongoing hosting as well as exploring ways to improve ROS infrastructure for the greater community.
In the coming weeks, we’ll migrate the wiki, ROS Answers, and the Ubuntu package repository from Willow Garage to the OSL. We’ll announce more detailed plans as they come together and we’ll do our best to minimize disruptions during the migration.
As you might imagine, hosting for these critical services, which are heavily used around the world and around the clock, costs money. We need your help! A big thank you to the ROS-Industrial Consortium, which has stepped up to support part of this cost. If your organization can financially support ROS project hosting, please contact us at info@localhost.

Tully and Melonee were recently interviewed about their creation, the TurtleBot. Congratulations to both for the impact they’ve had on the entire community!

OSRF is pleased to welcome Isaac Saito! Isaac Saito is a software engineering intern with the ROS Team, working in particular on the RQT GUI framework. Before coming to the US from Japan to get his M.sc in Systems Engineering at Southern Methodist University (Dallas, TX), he worked on a web search system for Keio University (30K+ affiliates organization) working closely with IBM Tokyo Research utilizing information retrieval, and also built pedestrian navigation prototypes for mega-sized train stations with East Japan Railway.

ROS experts Dirk, William, and Tully recently joined OSRF and are settling in to the ROS Cave to continue their work on the software. To celebrate, we took a field trip to K1 Speed for a friendly but competitive go karting grand prix. Highlights from our outing included: a minor crash, one driver’s inspiring journey from last to third place, two emotional awards ceremonies, and the realization that Kazuto, our intern from JSK, looks great in a yellow headsock. While some egos were bruised, it was great to get out of the building and unwind in tiny cars.


Registration for ROSCon 2013 is now open. Early registration ends March 31st. We’re looking forward to seeing many of you in Germany in May!

From ros-users@:
The Robonaut team has launched a TopCoder challenge to create a controller for our ISS taskboard simulation that improves the behavior of the switches, etc. and publishes the states to rostopics. If you’d like to help out (and potentially make up to $1500), check out the challenge here.
From the challenge description:
Robonaut 2 is the first humanoid robot in space and was sent to the space station with the intention of taking over tasks too dangerous or too mundane for astronauts.
But Robonaut 2 needs to learn how to interact with the types of input devices the astronauts use on the space station. To do that, we have built several Taskboards for Robonaut to play with.
In future challenges, you will control Robonaut and teach him how to interact with the Taskboard. But first, the simulation for the ISS Taskboard needs to be fixed.
For full requirements, please check here.
[Cross-posted from the ROS-Industrial blog]
Recently Willow Garage, maker of the PR2 service robot and developer/custodian of the ROS core, announced that their funding model was about to change. This has precipitated speculation about the future of ROS and, by extension, ROS-Industrial. What has not been widely communicated is that the Open Source Robotics Foundation (OSRF), an independent nonprofit company founded last summer with support from Willow Garage, was chartered in-part to become the long-term home for ROS core development, ROS wiki hosting, and ROS answers support. OSRF recently announced that key ROS developers from Willow Garage soon will move to OSRF. We have been in communication with both Willow Garage and OSRF and know that the ROS core is in the capable hands of the same developers who are credited with its widespread adoption over the past five years. Furthermore, we note that OSRF is participating in the ROS-Industrial Consortium kick off meeting March 6-7th (agenda). We look forward to continuing collaboration with both Willow Garage and OSRF as open source robotics continues to accelerate the growth and capabilities of robotic systems.
[Cross-posted from the ROS blog]
A Press Release from Clearpath Robotics
Kitchener, ON, Canada – February, 2013
We have received many inquiries about the future of ROS since the announcement of a change in Willow Garage’s business plan. To our many valued clients, you may rest assured that we will continue to support and build upon ROS and open-source robotics software for our products.
We are proud to say that we were one of the first companies to support and use ROS, and we are humbled to see how much it has advanced the robotics industry. We believe that the strength of the global ROS community is at critical mass and we are confident it will continue to thrive and grow.
The transition of ROS stewardship from Willow Garage to the Open Source Robotics Foundation has been under way for many months and Clearpath will do everything in it’s power to assist with this transition. Our position as a partner to both academic and industrial research has given us a unique perspective on commercializing robotics from the lab to the real world, and the ROS ecosystem is making this happen faster than we had ever hoped.
The first 5 years of ROS has changed our industry forever. We can’t wait to see what the next 5 years of ROS will bring.
The ROS-Industrial team was at the Automate trade show a couple of weeks ago. Here’s a great video showing the ROS-Industrial capabilities that they demonstrated:



As we mentioned on Monday, here at OSRF we’re starting to play a more prominent role in the ROS community. As a major step in that direction, we’re pleased to announce that, in the next few weeks, Tully Foote, Dirk Thomas, and William Woodall will be joining OSRF!
You probably already know each of them from ros-users@ and ROS Answers, not to mention GitHub. And if you’ve used ROS, you’ve used their code, as they work on many of the core ROS libraries and tools.
We’re excited to have Tully, Dirk and William on the team and are looking forward to being a part of their future contributions to ROS.
First of all, we’d like to extend a heartfelt thank you to Scott and Steve and the entire Willow Garage team who have, over the last five years, made an unprecedented contribution to the robotics community. Willow Garage set out to have impact, and there can be no doubt that ROS has had a worldwide impact, on a scale greater than we ever hoped. Thank you!
As you may have heard, there are some changes underway at Willow Garage.
Given the recent news, we’re working with our friends at Willow Garage to accelerate the transition of ROS stewardship to OSRF. One of the goals in establishing OSRF was to provide a long-term home for ROS, and that’s where we’re headed with this transition. Through generous support from the National Robotics Initiative, we’re assembling a team at OSRF to continue to guide the development of ROS. We don’t expect ROS development to slow down, nor do we expect any interruption to the online resources that we’ve all come to rely on (e.g., the ROS wiki and ROS answers).
At OSRF, we look forward to taking a more prominent role in the ROS ecosystem. We’ll be seeking increased community involvement in ROS development, decision-making, maintenance, and support. Open source software works best when everyone is invested and involved, and we will work closely with the ROS community, including product development groups, research teams, students at all levels, hobbyists, and interested groups everywhere.
Here’s to ROS’s next five years!

OSRF is pleased to welcome Kazuto Murase! Kazuto studies Mechano-Infomatics at the University of Tokyo in the JSK Lab. He has been developing a robot with arm and eye, integrating recognition and action to perform tasks.
At OSRF, he will apply his experience developing rosjava/Android applications to improve the suite of apps available for use with robots, including new tools for managing deployment and launching of apps. He is excited to learn about America and have a true California experience during his time at OSRF.
.jpg)
OSRF is pleased to welcome Carlos Agüero! Carlos received his Ph.D. and M.S. from Universidad Rey Juan Carlos in Computer Science, under the supervision of Dr. José M. Cañas and Dr. Vicente Matellán. Carlos is a Robotics enthusiast, and the multidisciplinary aspects of robotics and the challenges faced by real robotics projects have sculpted his formation and career. Ad hoc networks for mobile robots were the target of his early days of research. He designed and developed an autonomous system for detecting overtaking maneuvers applied to trucks. Carlos’s research has been focused on multi-robot object localization, task allocation and multi-target object localization. He has been a proud RoboCuper since 2005 and is a co-founder of Spiteam, the RoboCup Standard Platform League team. He co-developed a complete robot architecture (Behaviour-based Iterative Control Architecture, BICA) from scratch for the Nao robot applied to robot soccer and Alzheimer therapy.
Before joining OSRF, Carlos held a faculty position in the GSyC department at Universidad Rey Juan Carlos and was Director of the Telematics and Computer Systems Master program. In 2010 and 2011, he visited the Artificial Intelligence Laboratory at the University of Texas at Austin, and CORAL Research group at Carnegie Mellon University.
On January 16th, OSRF hosted a full-day hackathon on ROS/Android. We were very happy to have folks from Willow (Austin, Tully, and Chad) Yujin (Daniel, Jihoon, and Huey) and Google (Damon). From OSRF, Hugo, Stephen, Ian, Brian, Kazuto, and Morgan took part. And Ken stopped by (with Ninja, of course).
The day was a great success. There’s really nothing like getting everybody in the same room for a day. We worked through a bunch of issues on workflow and build process, we ported some existing apps to the newest libraries, and we wrote some new apps. All of our work is available at github, in the rosjava and ros-android organizations. Please have a look and contribute if you can!
We were so busy during the day that we didn’t get many pictures. Jihoon took the following two shots in the morning while we were planning the day:



OSRF is pleased to welcome Jose Luis Rivero! Jose Luis is a Computer Engineer from the Carlos III University of Madrid. During his university times he was tempted by compilers and customized binaries and joined the Gentoo Linux project as developer for 6 years. Jose Luis moved from Madrid to Barcelona to finish his studies at UPC University. There he started work in the Institut de Robòtica i Informàtica Industrial (IRI). Being an open source enthusiast, and together with his colleagues Guillem Alenyà and Sergi Hernandez, Jose Luis began The Humanoid Lab initiative, which brings robotics and open source projects to university students. In his last two years at IRI, Jose Luis worked with PhD students to improve software practices and encourage development of open source ROS code for mobile robotics and perception and manipulation. For Jose Luis, working at OSRF, producing robotics software following an open source philosophy, is a dream come true.

OSRF is pleased to welcome Ian Chen! Ian received a PhD in Electrical and Computer Engineering from the University of Auckland in 2011 under the supervision of Bruce MacDonald and Burkhard Wünsche. Ian spent his PhD investigating methods for improving the robot development cycle, particularly through the use of real time simulation and visualization. After a short interlude working as a software engineer on the open source Qt framework, Ian is excited to be back in the realm of robotics where he can continue his career in robot simulation and open source development at OSRF.
[Cross-posted from the ROS blog]
ROS turned five years old in November, so it’s time for our sort-of-annual State of ROS. If you recall, we took a deep dive into the growth of ROS in our third-year anniversary post. We won’t be as prolific this time around, but suffice it to say that the past two years have built on the excitement, growth, and adoption of ROS.
Numbers don’t tell the entire story, but it’s a good place to start.
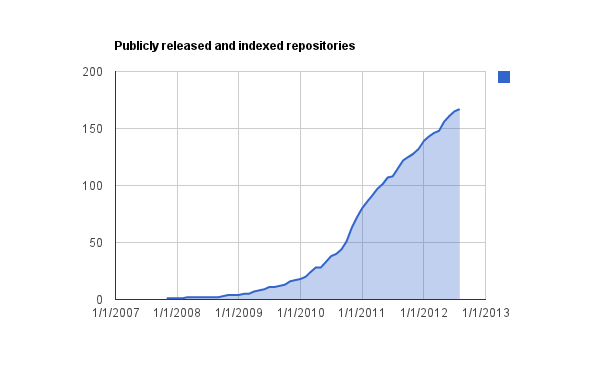
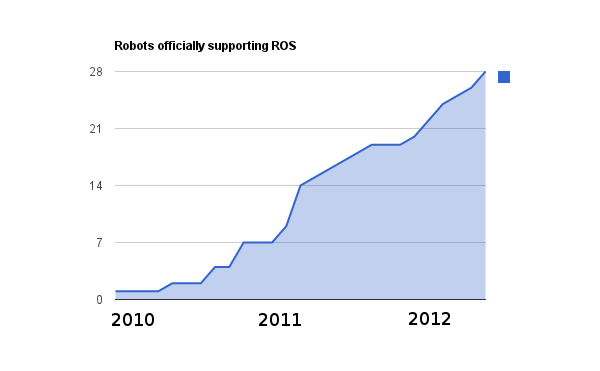


The latest version of ROS, Groovy Galapagos, is currently in Beta 1 Release. Groovy will be the sixth full release of ROS. This release is laying the foundations for enabling ROS to continue to grow the number of platforms supported.
Inspired by The Mozilla Foundation, The Apache Software Foundation, and The GNOME Foundation, our three-year anniversary blog post discussed the possibility of a ROS Foundation. In May of this year, Willow Garage announced the debut of the Open Source Robotics Foundation, Inc. OSRF is an independent non-profit organization founded by members of the global robotics community whose mission is to support the development, distribution, and adoption of open source software for use in robotics research, education, and product development.
Because of the BSD license for ROS, we often have no idea who is using ROS in their commercial deployments. We suspect there are a few we are missing, but two major new products were announced this year that are built using ROS. First is Baxter from Rethink Robotics. Baxter was announced just a few months ago and the company has set their sites on manufacturing industries. Check out IEEE Spectrum’s article on Rethink here. Also built on ROS is Toyota’s Human Support Robot (HSR), which is designed to help those with limited mobility within the home. ROS has even made inroads within the industrial robot world of late, specifically through the ROS-Industrial Consortium.
We can’t discuss commercial deployments of ROS without mentioning TurtleBot, originally released in April 2011. Recognizing that not everyone can afford, or even needs, a $280,000 PR2 robot, TurtleBot was brought to market for the express purpose of letting as many people as possible get their hands on ROS. TurtleBot 2.0 was recently featured on Engadget and is now available for pre-order at www.turtlebot.com.
At Willow Garage, we often refer to ourselves as a software company disguised as a robot company, and we can point to the ongoing growth of ROS as proof of that assertion. We have also been stating for some time that we need a LAMP stack for robotics. With the latest developments in commercial robots built on ROS, it feels like we are in the beginning stages of that process. We can’t predict what ROS will look like in five year, or twenty-five, but if we continue to see the adoption, innovation, and excitement from the ROS community that we have seen in the first five years, then things are certainly looking Rosey.

Call for Proposals: ROSCon 2013
Stuttgart, Germany
11-12 May 2013
(immediately following ICRA)
Details: http://roscon.ros.org/
Proposals: submit@roscon.ros.org
Questions: info@roscon.ros.org
ROSCon 2013 is a chance for ROS developers of all levels, beginner to expert, to spend an extraordinary weekend learning from and networking with the ROS community. Get tips and tricks from experts, network, and share ideas with fellow developers from around the globe.
ROSCon is a developers conference, in the model of PyCon and BoostCon. Following the success of the inaugural ROSCon in St. Paul, Minnesota, this year’s ROSCon will be held in Stuttgart, Germany. Similar to last year, the two-day program will comprise technical talks and tutorials that will introduce you to new tools and libraries, as well as teach you more about the ones you already know. The bulk of the program will be 30-40 minute presentations (some may be longer or shorter).
Want to present at ROSCon? Submit a proposal! For details on proposing, go to http://roscon.ros.org/
If you don’t want to make a formal presentation, you should still bring your new project or idea to ROSCon!
There will be sessions of Lightning Talks, which are 5-minute mini-talks that are scheduled just-in-time at the conference. There will also be open space for Birds-of-a-Feather (BoF) meetings, impromptu hacking sessions, and informal presentations.
On behalf of the ROSCon 2013 Organizing Committee:

OSRF is pleased to welcome Steven Peters! Steven recently defended his PhD thesis, “Optimal Planning and Control for Hazard Avoidance of Front-Wheel Steered Ground Vehicles,” in the MIT Mechanical Engineering Department. At OSRF, he will apply his experience with dynamics and control to physics simulation for robotic manipulators and vehicles. As a Northern California native, he is happy to be back home.
The OSRF offices will be quieter than usual this week as Brian, John, Nate, Steffi, and Morgan will be at DARPA headquarters in Washington, DC (well, Arlington, VA) for the three-day kickoff of the Robotics Challenge.
The highlight of our week will be a full-day tutorial on the recently released DRC Simulator that we’re teaching on Thursday. We’re expecting about 75 Challenge participants who are eager to learn about this first version of the DRC Simulator and we’re hoping to get feedback from them that can influence our future development plans.

OSRF is pleased to welcome Jimmy Sastra!
He received his Ph.D. in Mechanical Engineering and Applied Mechanics from
the University of Pennsylvania in August 2011 under the supervision of Mark Yim. Working with Mark, Jimmy developed hardware and software for many generations of Modular Reconfigurable Robots. In his thesis work, he showed that these robots can be used to quickly prototype and analyze a variety of dynamic locomotion gaits from rolling like a wheel to running with compliant legs. They can even put themselves back together after they are kicked apart into separate pieces.
Prior to joining OSRF, he worked at Willow Garage, where he learned a number of things, including how to pull a good office prank.

OSRF is pleased to welcome Hugo Boyer! Hugo received a mechanical engineering degree from Ecole Polytechnique of Montreal and has been a professional developer for over 15 years. Recently, at Makerbot Industries, he created Miracle-Grue, Makerbot’s first tool path engine for 3D printers. Before that, he worked on parallel GPU algorithms for the computational chemistry lab at McGill University, and was an architect of SIMSAT, the real time spacecraft simulator of the European Space Agency. Hugo is honored to join the OSRF simulation team where he hopes to help make robot dreams come true.

OSRF is pleased to welcome Stephen Brawner!
Currently a Computer Science PhD student at Brown University working with Chad Jenkins in the Brown Robotics Lab, Stephen is joining us as a software research intern for Fall 2012 / Winter 2013. He’ll be furthering his interest in researching hardware and software testing to improve robot system reliability and reduce the iteration time on development.
On Sept. 6th, OSRF officially received a contract from DARPA for the
simulation component of the Robotics Challenge, as reported here. The contract amounts to $6.44 million over the next 2.5 years, during which time we’ll take a major leap forward in simulation. We are also working with two research groups led by Dr. Karen Liu from Georgia Tech and Dr. Scott Delp from Stanford. Karen and Michael will conduct long-term research and development along the lines of deformable contact modeling, object manipulation, and constraint-based contact modeling.
Our efforts are now in full swing as we approach the DRC kickoff in late October of this year. Keep a look out for new tutorials, documentation, and features. This is also a great time to get involved by experimenting with
Gazebo and ROS, creating new and interesting applications, and getting your voice heard through our mailing list.
On the heels of the recent announcement that Rethink’s Baxter was built on ROS, we heard today from our friends at Toyota that their new robot is also running ROS!
Toyota’s Human Support Robot, or HSR, will provide assistance to older adults and people with disabilities. A one-armed mobile robot with a telescoping spine, the HSR is designed to operate in indoor environments around people. It can reach the floor, tabletops, and high counters, allowing it to do things like retrieve a dropped object or put something away in its rightful place. An exemplar of the next generation of robot manipulators, the arm is low-power and slow-moving, reducing the chance of accident or injury as it interacts with people.


And it runs ROS. Dr. Yasuhiro Ota, Manager of the Toyota Partner Robot Program, tells us that the HSR runs ROS Fuerte and uses a number of ROS packages, including:
roscpp,
rospy,
rviz,
tf,
std_msgs,
pcl,
opencv.
As for why they chose to use ROS, Dr. Ota says, “ROS provides an excellent software developmental environment for robot system integration, and it is also comprised of a number of useful ready-to-use functions.”

We’re pleased to announce a collaboration between OSRF and Yujin Robot. Our friends at Yujin have been long-time supporters of and contributors to ROS. In particular, they’ve been at the forefront of efforts to use ROS on Windows and in multi-robot environments. Daniel Stonier from Yujin presented on the state of ROS on Windows (slides) this year at ROSCon.
In the new Robotics in Concert project, funded by the Korean Ministry of Knowledge Economy, Sam Park and his team at Yujin are leading an international team to develop tools to enable authoring, deployment, and management of multi-robot systems in production environments. OSRF’s role in the project is to enhance and improve the ROS/Android toolchain to make it easy to build reliable “robot apps” that provide phone/tablet-based human interfaces. We’re looking forward to collaborating on this project with Yujin and other robotics groups in Korea, and are expecting some great open source software to result.
And we’re looking forward to playing with the sleek new KobukiBots:



There’s exciting news out of Boston today with the launch of Rethink Robotics’s new robot. Rethink Robotics is developing a family of low cost and highly intelligent robots that can perform simple tasks in a manufacturing environment, increasing the productivity of the people around them. Rethink Robotics was founded by Rodney Brooks, former Director of the MIT Computer Science & Artificial Intelligence Laboratory, and co-Founder of iRobot Corporation.
Rethink’s robots can be taken out of the box, taught a task by anyone, and start work in a few hours, eliminating the need for systems integration. They are safe to interact with people at close range and are easy to train and retrain on the fly. They are nothing like any existing industrial robots.
While all of this is very exciting for the robotics industry, and certainly for our friends at Rethink, what we personally find most exciting is the role played by ROS in today’s news. Rethink’s new Baxter robot is, in the words of CEO Scott Eckert, “built upon ROS.” We had some hint from Rethink’s (then Heartland’s) support of ROSCon 2012 that they were doing something with ROS, but we were very pleasantly surprised today to hear that ROS is such a central part of Baxter.

As ROS edges closer to its five-year anniversary, this is a great milestone for the ROS community. Rethink is actively hiring for a Senior Developer Relations Engineer with expertise in ROS, and expects that individual to play an important role as part of the ROS community.
Congratulations to everyone at Rethink Robotics, and we are looking forward to their contribution to the ROS community.

We’re happy to announce that Nate Koenig successfully defended his PhD dissertation yesterday. You might not have known that, in addition to his work on Gazebo, Nate has been pursuing his Computer Science PhD in the USC Interaction Lab with his advisor Maja J Mataric’.
In his dissertation, titled “Robot Life-Long Task Learning from Human Demonstrations: A Bayesian Approach,” Nate enabled robots to learn goal oriented long-term decision processes from human demonstrations. The approach facilitated knowledge transfer between tasks, and online task modification. We’re honored to have another doctor on the staff at OSRF. Welcome back, Dr. Koenig!

OSRF is pleased to welcome Morgan Quigley! Morgan recently defended his PhD thesis, “Hardware and Software Systems for Personal Robots,” in the Stanford Computer Science Department. At OSRF, his work will span software, firmware, and embedded design, by creating infrastructure to allow seamless communication and coordination between ROS and embedded systems.
As the “godfather of ROS,” Morgan gave the opening keynote at ROSCon2012. He’s had a hand in the design and development of many robots, including this one from Sandia.
4.png)
As ROS software has become more widely used around the world, there are more and more people looking for experts who can help with everything from introductory training to custom engineering. At the same time, there’s a growing group of companies and individuals who offer ROS-related consulting services. With the goal of helping those two groups to connect with each other, today we’re announcing the OSRF Consultants Network.
Whether you’re looking for someone to help familiarize your team with ROS or to build a custom automated system, the consultants listed in the network can help.
If you or your company offer open source robotics consulting services, please send us your listing!

Back in July, Wolfram, Brian, and Nate did the California Death Ride (aka the Tour of the California Alps). It was a long but rewarding day, as evidenced by the mood at the top of the last climb:



Not pictured are fellow robotic cyclists Dieter Fox and Sebastian Thrun, who also did the ride.
An unusual feature of our building is the three flagpoles out front. We’re starting to put them to use (more to come):


Brian was recently interviewed by Bill Morris of I Heart Robotics about OSRF.

Brian attended the progress meeting for the DARPA Maximum Mobility and Manipulation (M3) program in Philadelphia earlier this week. Besides having the chance to see the impressive and varied work being done as part of M3 (from ostrich-like runners to inflatable walkers), Brian was there to present OSRF’s plans for the robot simulation that will be built to support the DARPA Robotics Challenge (DRC) and get feedback from the M3 participants, many of whom have a lot of experience using and building robot simulators. The simulation session was very productive, with lots of great ideas and pointers provided by the audience. We’ll be staying in touch with many of the M3 folks as we get to work on the DRC simulator.
Slides from Brian’s talk: [PDF]
We’re pleased to announce that Willow Garage is a Founding Contributor to OSRF! This status acknowledges the critical financial, organizational, and moral support that Willow provided during OSRF’s incubation over the past few months, as well as a generous financial contribution that has allowed us to bootstrap company operations.
We especially want to thank Steve Cousins, CEO of Willow Garage, who has been instrumental in the creation of OSRF. We’re working closely with Willow on software projects, notably Gazebo and ROS, and we look forward to Willow’s continued support of OSRF’s mission.
After a couple of months of setup, OSRF is up and running! You’re already checking out our new website. You’ll see more content appearing here as we start spinning up new projects.
We just moved into our new office:

It’s a 3,000 sq ft building in Mountain View, walking distance to Castro Street and the train station. We’re looking forward to getting to know the cafes, restaurants, and other amenities that Mountain View has to offer.
And the commuters among us are already enjoying the express train service.
We’re still equipping the office, so there isn’t much yet in the way of furniture. But, importantly, there are fish.

Once we have things set up, there’ll be an office-warming party to plan.
{kind=link}